{kind=link}
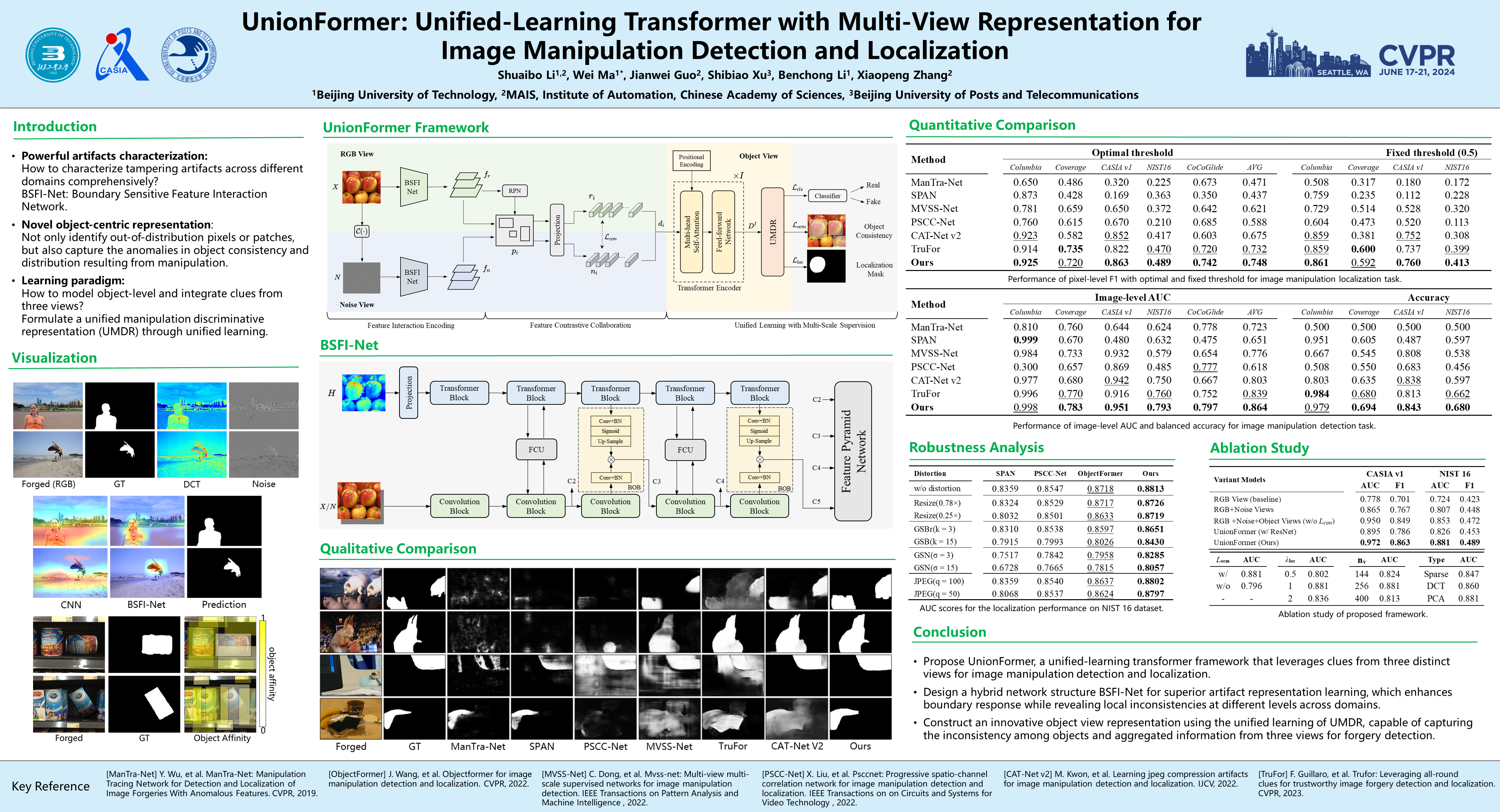
We present UnionFormer, a novel framework that integrates tampering clues across three views by unified learning for image manipulation detection and localization. Specifically, we construct a BSFI-Net to extract tampering features from RGB and noise views, achieving enhanced responsiveness to boundary artifacts while modulating spatial consistency at different scales. Additionally, to explore the inconsistency between objects as a new view of clues, we combine object consistency modeling with tampering detection and localization into a three-task unified learning process, allowing them to promote and improve mutually. Therefore, we acquire a unified manipulation discriminative representation under multi-scale supervision that consolidates information from three views. This integration facilitates highly effective concurrent detection and localization of tampering. We perform extensive experiments on diverse datasets, and the results show that the proposed approach outperforms state-of-the-art methods in tampering detection and localization.