{kind=link}
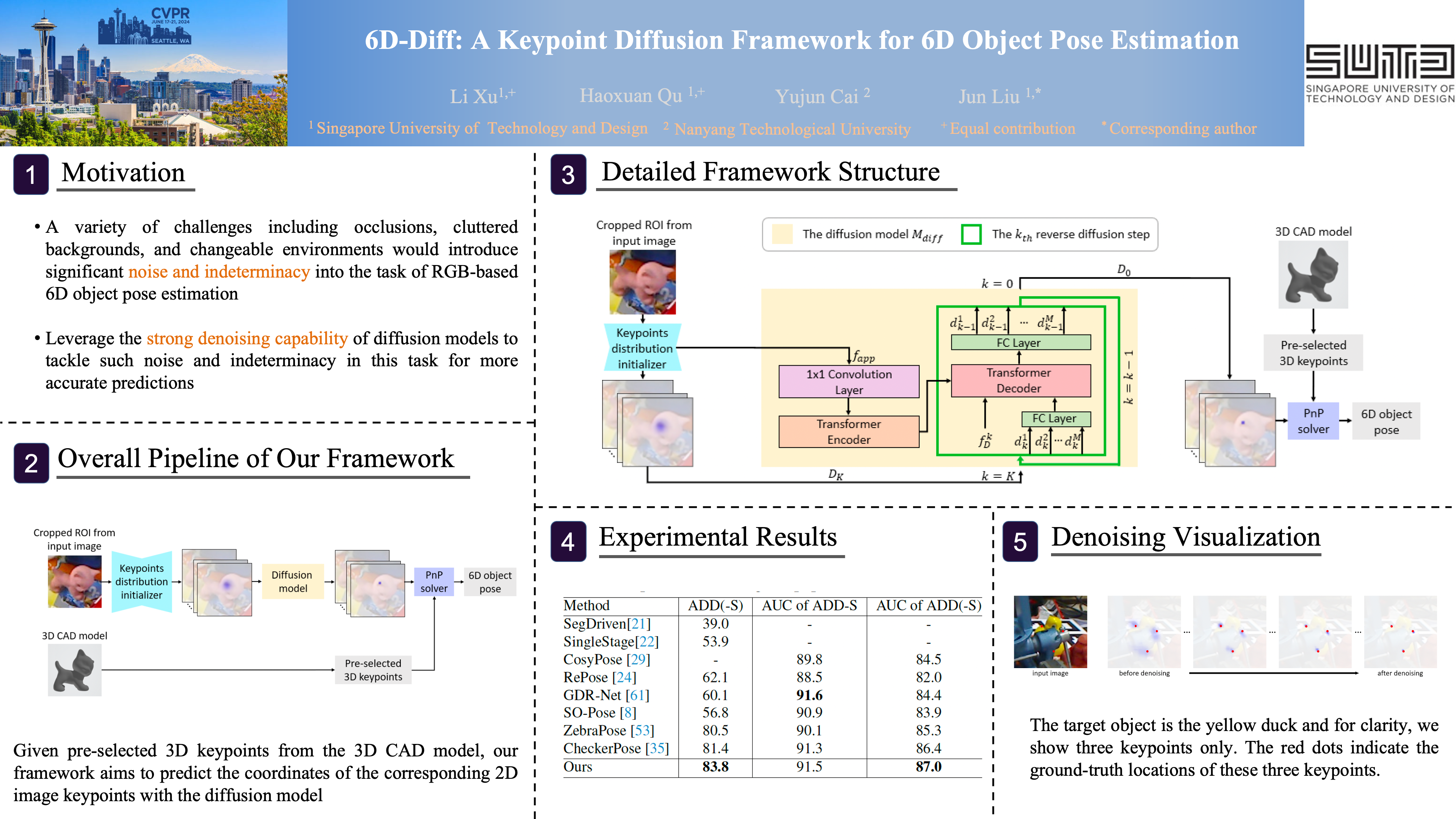
Estimating the 6D object pose from a single RGB image often involves noise and indeterminacy due to challenges such as occlusions and cluttered backgrounds. Meanwhile, diffusion models have shown appealing performance in generating high-quality images from random noise with high indeterminacy through step-by-step denoising. Inspired by their denoising capability, we propose a novel diffusion-based framework (6D-Diff) to handle the noise and indeterminacy in object pose estimation for better performance. In our framework, to establish accurate 2D-3D correspondence, we formulate 2D keypoints detection as a reverse diffusion (denoising) process.To facilitate such a denoising process, we design a Mixture-of-Cauchy-based forward diffusion process and condition the reverse process on the object appearance features.Extensive experiments on the LM-O and YCB-V datasets demonstrate the effectiveness of our framework.