{kind=link}
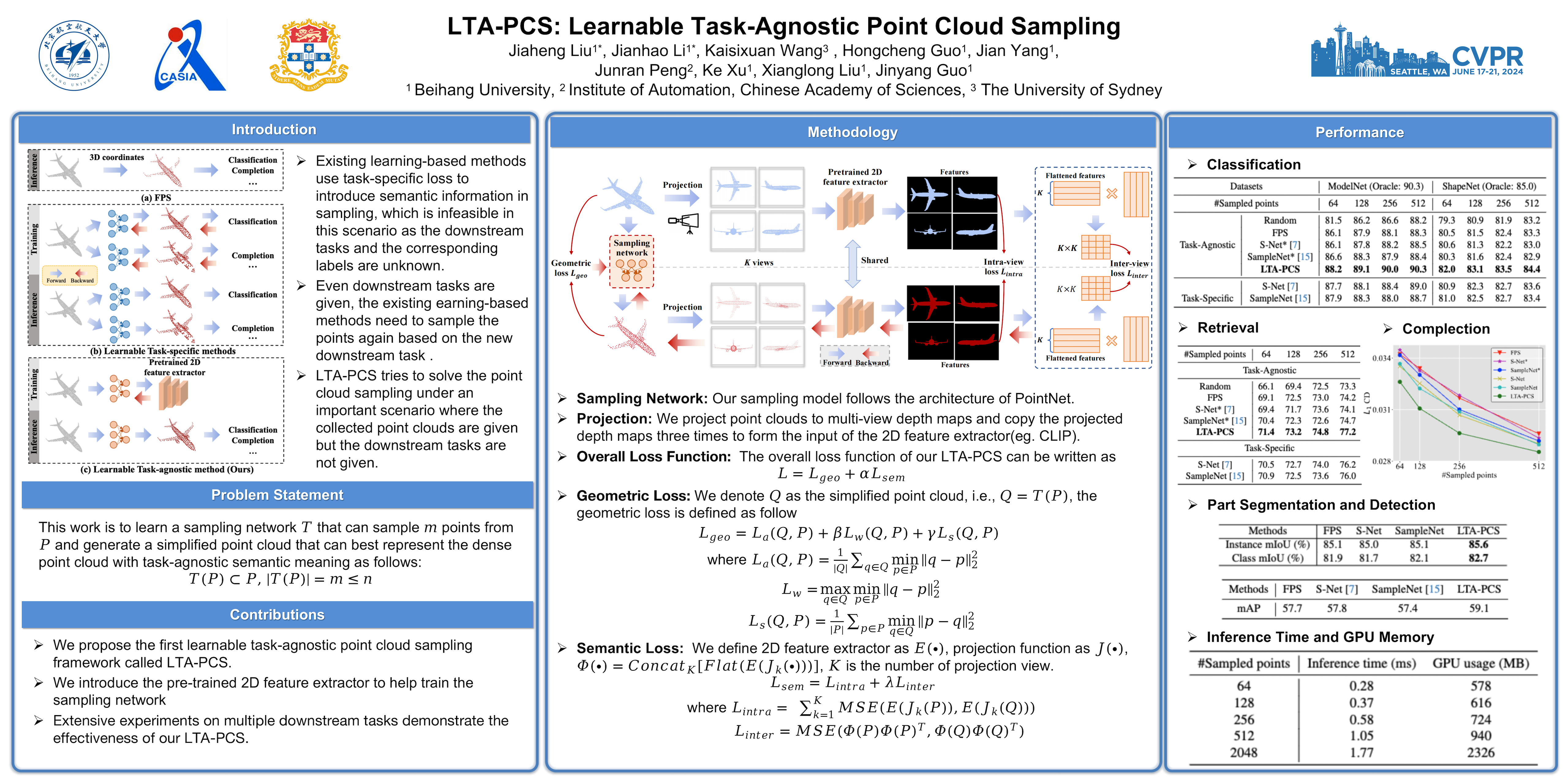
Recently, many approaches directly operate on point clouds for different tasks. These approaches become more compu- tation and storage demanding when point cloud size is large. To reduce the required computation and storage, one possible solution is to sample the point cloud. In this paper, we pro- pose the first Learnable Task-Agnostic Point Cloud Sampling (LTA-PCS) framework. Existing task-agnostic point cloud sampling strategy (e.g., FPS) does not consider semantic in- formation of point clouds, causing degraded performance on downstream tasks. While learning-based point cloud sam- pling methods consider semantic information, they are task- specific and require task-oriented ground-truth annotations. So they cannot generalize well on different downstream tasks. Our LTA-PCS achieves task-agnostic point cloud sampling without requiring task-oriented labels, in which both the ge- ometric and semantic information of points is considered in sampling. Extensive experiments on multiple downstream tasks demonstrate the effectiveness of our LTA-PCS.