Poster
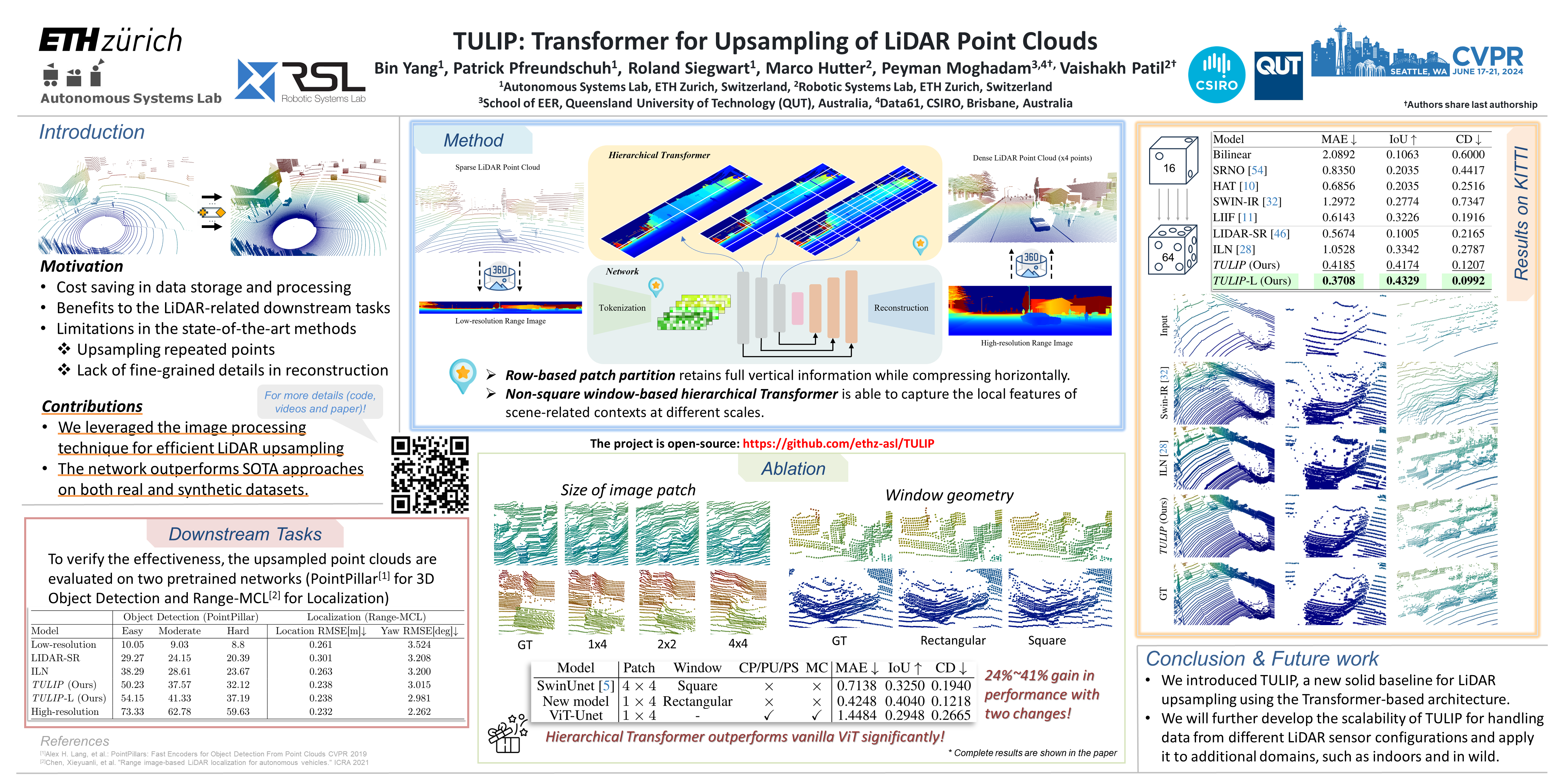
TULIP: Transformer for Upsampling of LiDAR Point Clouds
Bin Yang · Patrick Pfreundschuh · Roland Siegwart · Marco Hutter · Peyman Moghadam · Vaishakh Patil
Arch 4A-E Poster #72
{kind=link}
LiDAR Upsampling is a challenging task for the perception systems of robots and autonomous vehicles, due to the sparse and irregular structure of large-scale scene contexts. Recent works propose to solve this problem by converting LiDAR data from 3D Euclidean space into an image super-resolution problem in 2D image space. Although their methods can generate high-resolution range images with fine-grained details, the resulting 3D point clouds often blur out details and predict invalid points. In this paper, we propose TULIP, a new method to reconstruct high-resolution LiDAR point clouds from low-resolution LiDAR input. We also follow a range image-based approach but specifically modify the patch and window geometries of a Swin-Transformer-based network to better fit the characteristics of range images. We conducted several experiments on three different public real-world and simulated datasets. TULIP outperforms state-of-the-art methods in all relevant metrics and generates robust and more realistic point clouds than prior works. We plan to publish the code upon acceptance.