Poster
Generate Subgoal Images before Act: Unlocking the Chain-of-Thought Reasoning in Diffusion Model for Robot Manipulation with Multimodal Prompts
Fei Ni · Jianye Hao · Shiguang Wu · Longxin Kou · Jiashun Liu · YAN ZHENG · Bin Wang · Yuzheng Zhuang
Arch 4A-E Poster #420
{kind=link}
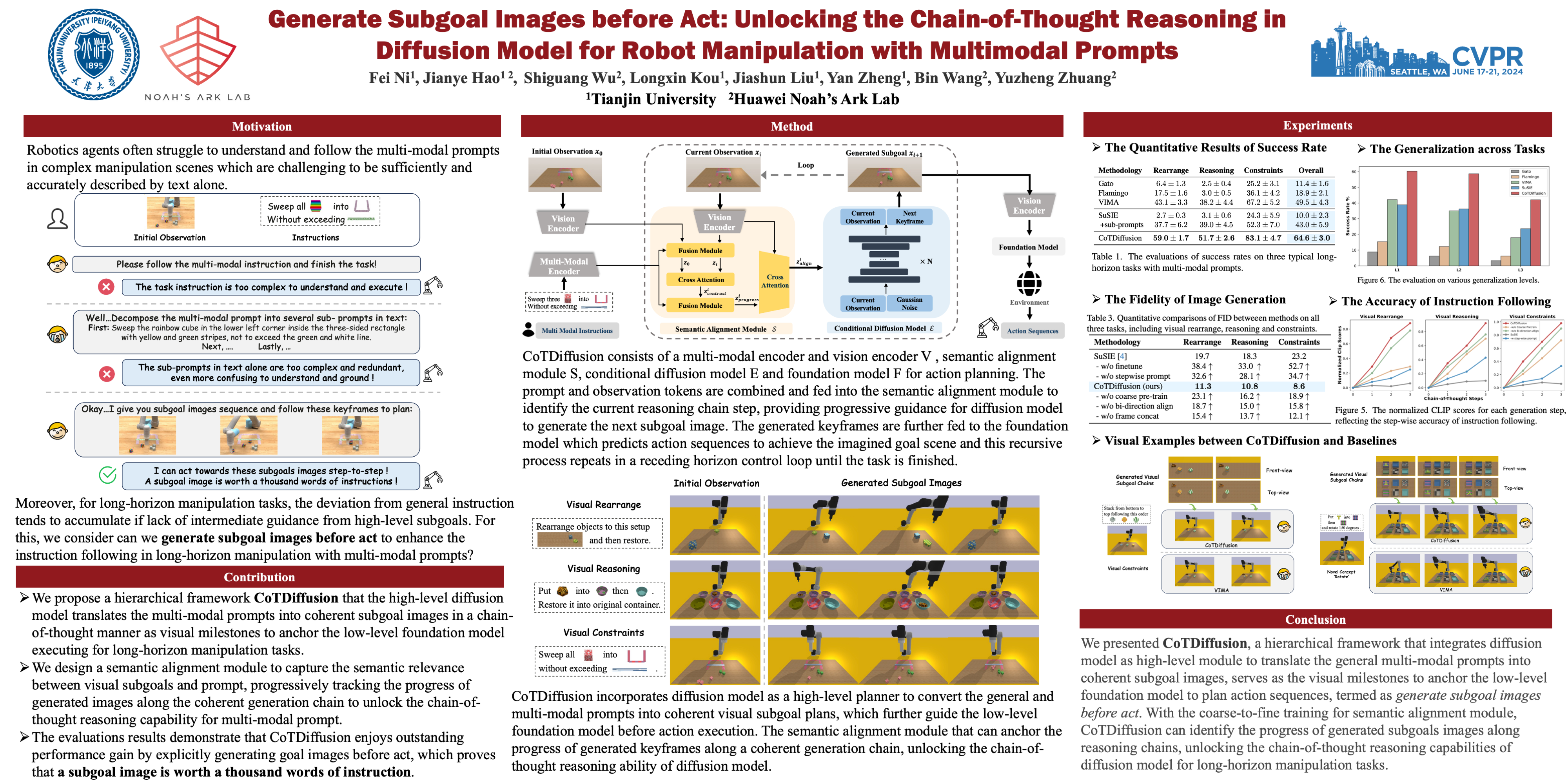
Robotics agents often struggle to understand and follow the multi-modal prompts in complex manipulation scenes which are challenging to be sufficiently and accurately described by text alone. Moreover, for long-horizon manipulation tasks, the deviation from general instruction tends to accumulate if lack of intermediate guidance from high-level subgoals. For this, we consider can we generate subgoal images before act to enhance the instruction following in long-horizon manipulation with multi-modal prompts?Inspired by the great success of diffusion model in image generation tasks, we propose a novel hierarchical framework named as CoTDiffusion that incorporates diffusion model as a high-level planner to convert the general and multi-modal prompts into coherent visual subgoal plans, which further guide the low-level policy model before action execution.We design a semantic alignment module that can anchor the progress of generated keyframes along a coherent generation chain, unlocking the chain-of-thought reasoning ability of diffusion model. Additionally, we propose bi-directional generation and frame concat mechanism to further enhance the fidelity of generated subgoal images and the accuracy of instruction following. The experiments cover various robotics manipulation scenarios including visual reasoning, visual rearrange, and visual constraints. CoTDiffusion achieves outstanding performance gain compared to the baselines without explicit subgoal generation, which proves that a subgoal image is worth a thousand words of instruction.