{kind=link}
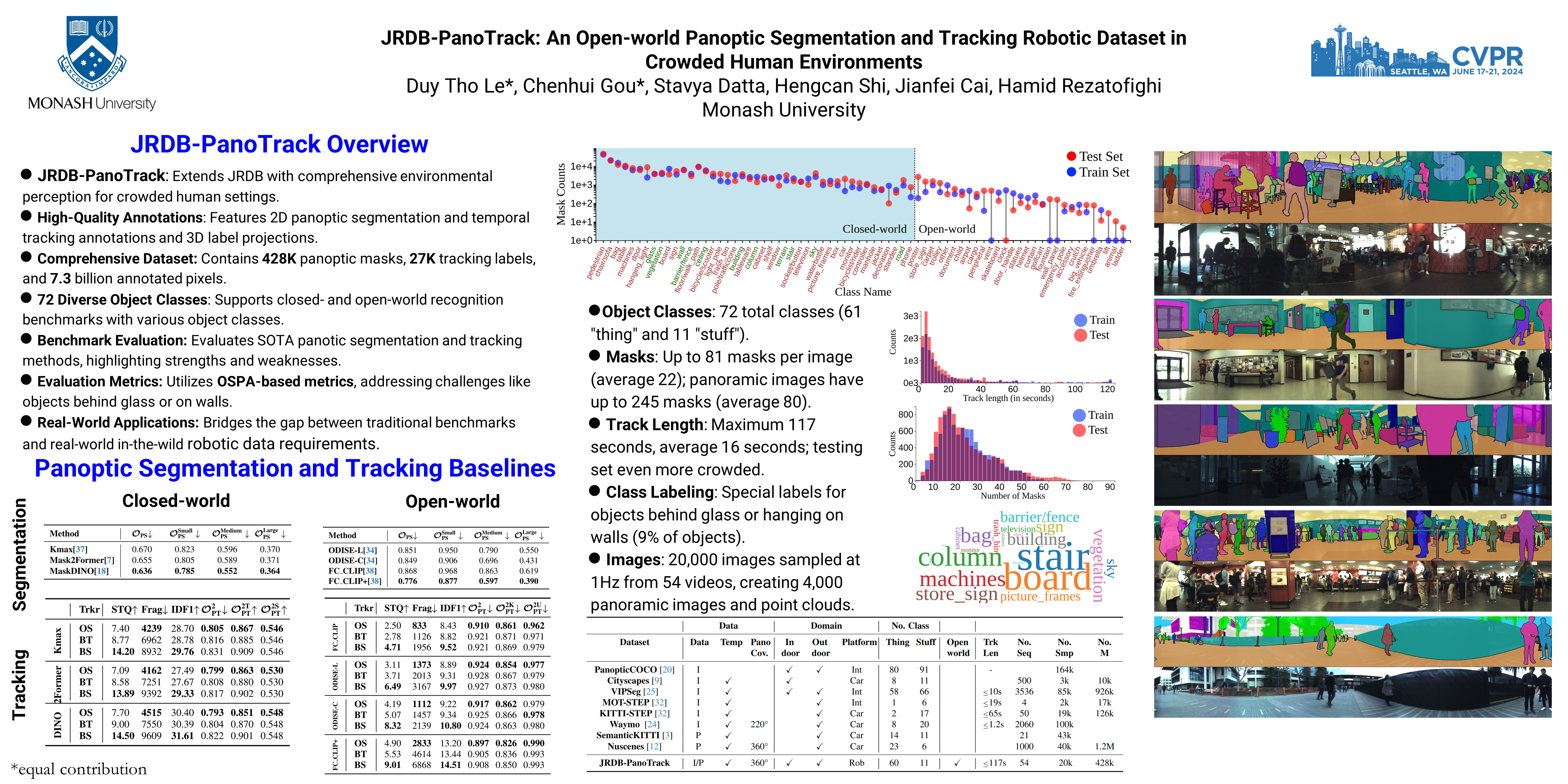
Autonomous robot systems have attracted increasing research attention in recent years, where environment understanding is a crucial step for robot navigation, human-robot interaction, and decision-making. Real-world robot systems usually collect visual data from multiple sensors and are required to recognize numerous objects and their movements in complex human-crowded settings. Traditional benchmarks, with their reliance on single sensors and limited object classes and scenarios, fail to provide the comprehensive environmental understanding robots need for accurate navigation, interaction, and decision-making. As an extension of JRDB dataset, we unveil JRDB-PanoTrack, a novel open-world panoptic segmentation and tracking benchmark, towards more comprehensive environmental perception. JRDB-PanoTrack includes (1) various data involving indoor and outdoor crowded scenes, as well as comprehensive 2D and 3D synchronized data modalities; (2) high-quality 2D spatial panoptic segmentation and temporal tracking annotations, with additional 3D label projections for further spatial understanding; (3) diverse object classes for closed- and open-world recognition benchmarks, with OSPA-based metrics for evaluation. Extensive evaluation of leading methods shows significant challenges posed by our dataset. JRDB-PanoTrack is available at [hidden].