Poster
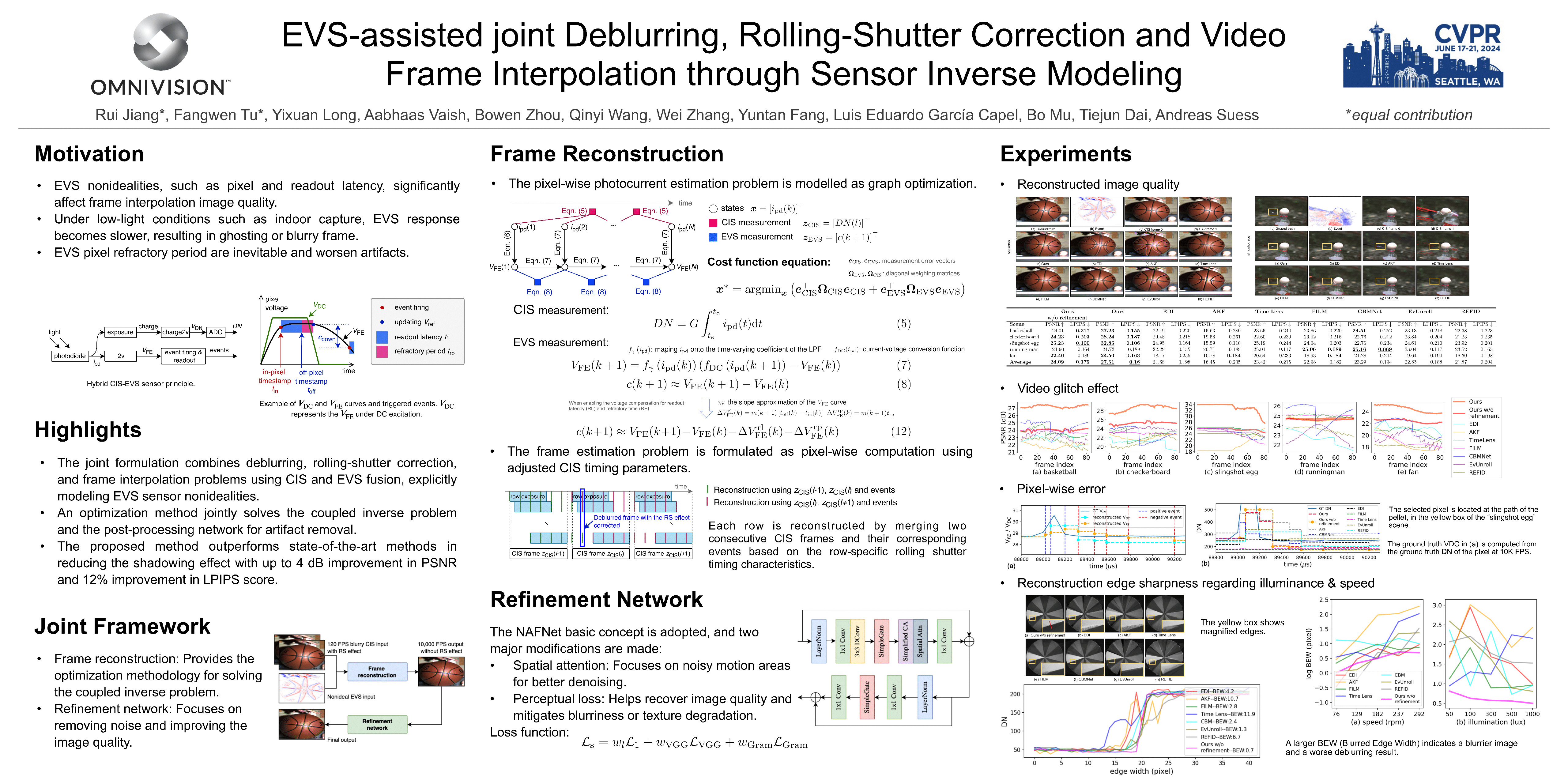
EVS-assisted Joint Deblurring Rolling-Shutter Correction and Video Frame Interpolation through Sensor Inverse Modeling
Rui Jiang · Fangwen Tu · Yixuan Long · Aabhaas Vaish · Bowen Zhou · Qinyi Wang · Wei Zhang · Yuntan Fang · Luis Eduardo García Capel · Bo Mu · Tiejun Dai · Andreas Suess
Arch 4A-E Poster #93
{kind=link}
Event-based Vision Sensors (EVS) gain popularity in enhancing CMOS Image Sensor (CIS) video capture. Nonidealities of EVS such as pixel or readout latency can significantly influence the quality of the enhanced images and warrant dedicated consideration in the design of fusion algorithms. A novel approach for jointly computing deblurred, rolling-shutter artifact corrected high-speed videos with frame rates up to 10000 FPS using inherently blurry rolling shutter CIS frames of 120 FPS to 150 FPS in conjunction with EVS data from a hybrid CIS-EVS sensor is presented. EVS pixel latency, readout latency and the sensor's refractory period are explicitly incorporated into the measurement model. This inverse function problem is solved on a per-pixel manner using an optimization-based framework. The interpolated images are subsequently processed by a novel refinement network. The proposed method is evaluated using simulated and measured datasets, under natural and controlled environments. Extensive experiments show reduced shadowing effect, a 4 dB increment in PSNR, and a 12% improvement in LPIPS score compared to state-of-the-art methods.