Poster
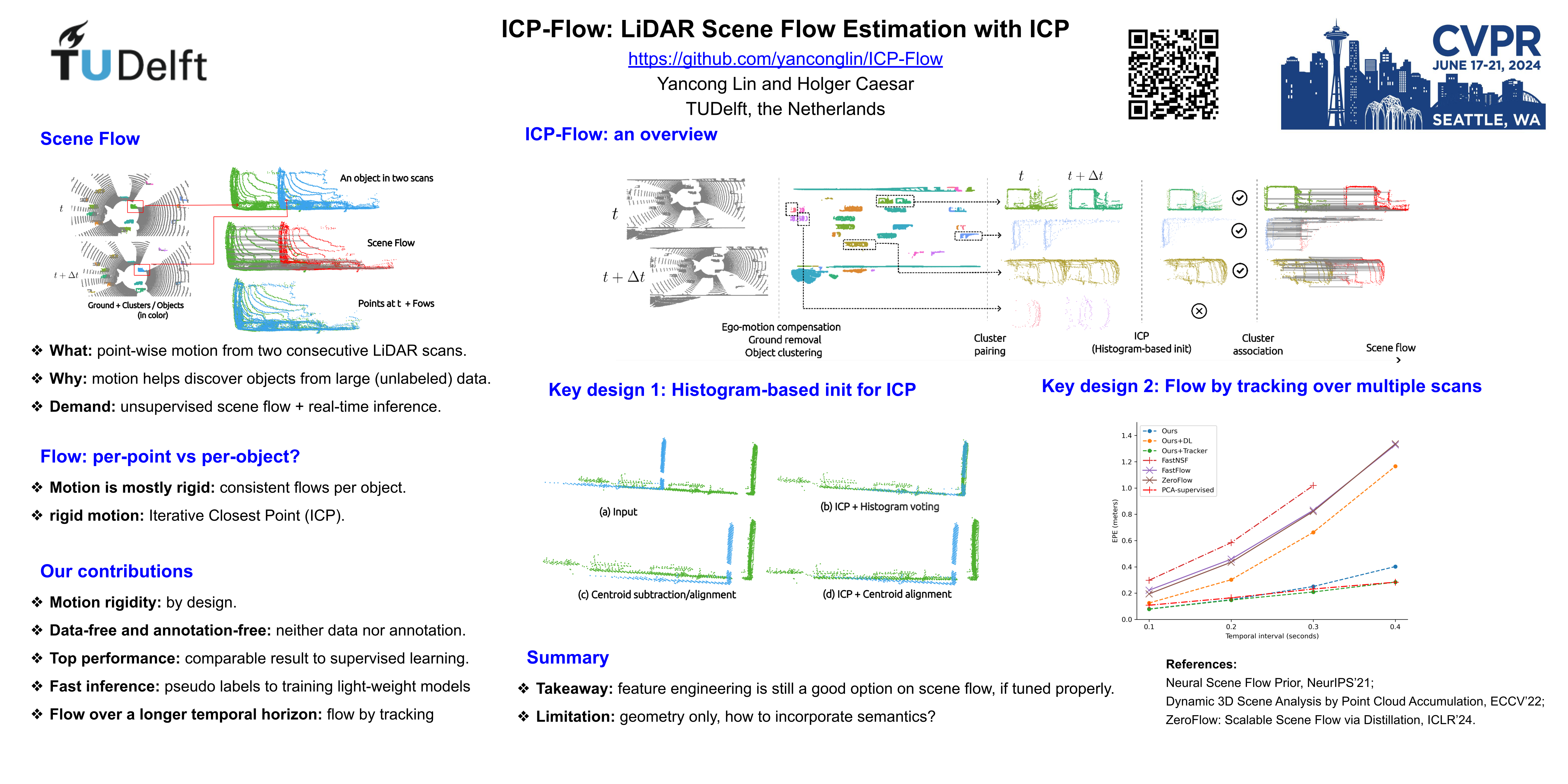
ICP-Flow: LiDAR Scene Flow Estimation with ICP
Yancong Lin · Holger Caesar
Arch 4A-E Poster #86
{kind=link}
Scene flow characterizes the 3D motion between two LiDAR scans captured by an autonomous vehicle at nearby timesteps.Prevalent methods consider scene flow as point-wise unconstrained flow vectors that can be learned by either large-scale training beforehand or time-consuming optimization at inference. However, these methods do not take into account that objects in autonomous driving often move rigidly. We incorporate this rigid-motion assumption into our design, where the goal is to associate objects over scans and then estimate the locally rigid transformations. We propose ICP-Flow, a learning-free flow estimator.The core of our design is the conventional Iterative Closest Point (ICP) algorithm, which aligns the objects over time and outputs the corresponding rigid transformations. Crucially, to aid ICP, we propose a histogram-based initialization that discovers the most likely translation, thus providing a good starting point for ICP. The complete scene flow is then recovered from the rigid transformations.We outperform state-of-the-art baselines, including supervised models, on the Waymo dataset and perform competitively on Argoverse-v2 and nuScenes. Further, we train a feedforward neural network, supervised by the pseudo labels from our model, and achieve top performance among all models capable of real-time inference. We validate the advantage of our model on scene flow estimation with longer temporal gaps, up to 0.4 seconds where other models fail to deliver meaningful results.