Poster
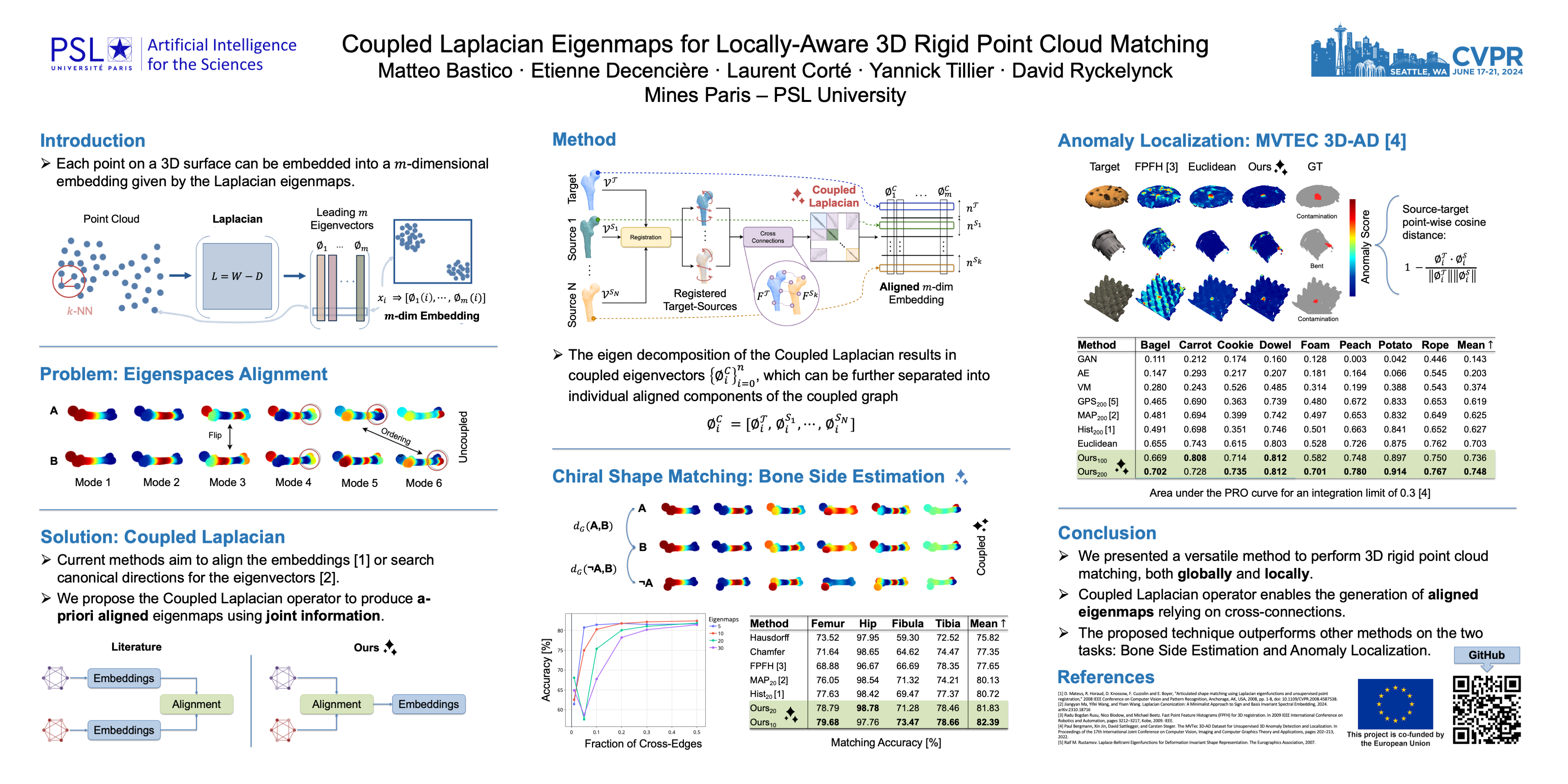
Coupled Laplacian Eigenmaps for Locally-Aware 3D Rigid Point Cloud Matching
Matteo Bastico · Etienne Decencière · Laurent Corté · Yannick TILLIER · David Ryckelynck
Arch 4A-E Poster #318
{kind=link}
Point cloud matching, a crucial technique in computer vision, medical and robotics fields, is primarily concerned with finding correspondences between pairs of point clouds or voxels. In some practical scenarios, emphasizing local differences is crucial for accurately identifying a correct match, thereby enhancing the overall robustness and reliability of the matching process. Commonly used shape descriptors have several limitations and often fail to provide meaningful local insights about the paired geometries. In this work, we propose a new technique, based on graph Laplacian eigenmaps, to match point clouds by taking into account fine local structures. To deal with the order and sign ambiguity of Laplacian eigenmaps, we introduce a new operator, called Coupled Laplacian, that allows to easily generate aligned eigenspaces for multiple registered geometries. We show that the similarity between those aligned high-dimensional spaces provides a locally meaningful score to match shapes. We firstly evaluate the performance of the proposed technique in a point-wise manner, focusing on the task of object anomaly localization on the MVTec 3D-AD dataset. Additionally, we define a new medical task, called automatic Bone Side Estimation (BSE), which we address through a global similarity score derived from coupled eigenspaces. In order to test it, we propose a benchmark collecting bone surface structures from various public datasets. Our matching technique, based on Coupled Laplacian, outperforms other methods by reaching an impressive accuracy on both tasks.