{kind=link}
Abstract:
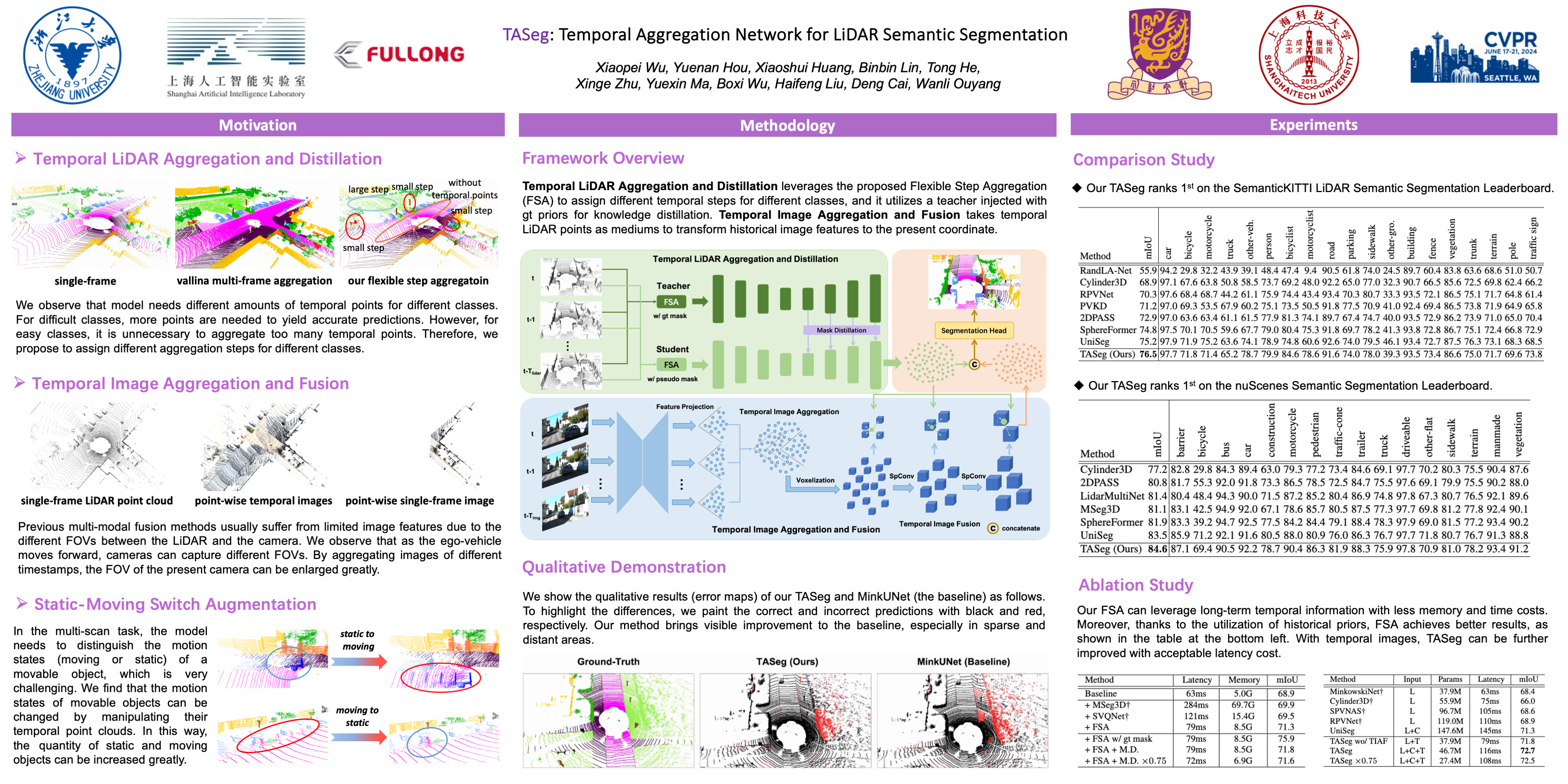
Training deep models for LiDAR semantic segmentation is challenging due to the inherent sparsity of point clouds. Utilizing temporal data is a natural remedy against the sparsity problem as it makes the input signal denser. However, previous multi-frame fusion algorithms fall short in utilizing sufficient temporal information due to the memory constraint, and they also ignore the informative temporal images. To fully exploit rich information hidden in long-term temporal point clouds and images, we present the Temporal Aggregation Network, termed TASeg. Specifically, we propose a Temporal LiDAR Aggregation and Distillation (TLAD) algorithm, which leverages historical priors to assign different aggregation steps for different classes. It can largely reduce memory and time overhead while achieving higher accuracy. Besides, TLAD trains a teacher injected with gt priors to distill the model, further boosting the performance. To make full use of temporal images, we design a Temporal Image Aggregation and Fusion (TIAF) module, which can greatly expand the camera FOV and enhance the present features. Temporal LiDAR points in the camera FOV are used as mediums to transform temporal image features to the present coordinate for temporal multi-modal fusion. Moreover, we develop a Static-Moving Switch Augmentation (SMSA) algorithm, which utilizes sufficient temporal information to enable objects to switch their motion states freely, thus greatly increasing static and moving training samples. Extensive experiments are conducted on SemanticKITTI and nuScenes benchmarks. Notably, our TASeg ranks 1$^{st}$ on three challenging tracks, i.e., SemanticKITTI single-scan track, multi-scan track and nuScenes LiDAR segmentation track, strongly demonstrating the superiority of our method. Codes will be made publicly available upon publication.
Chat is not available.