{kind=link}
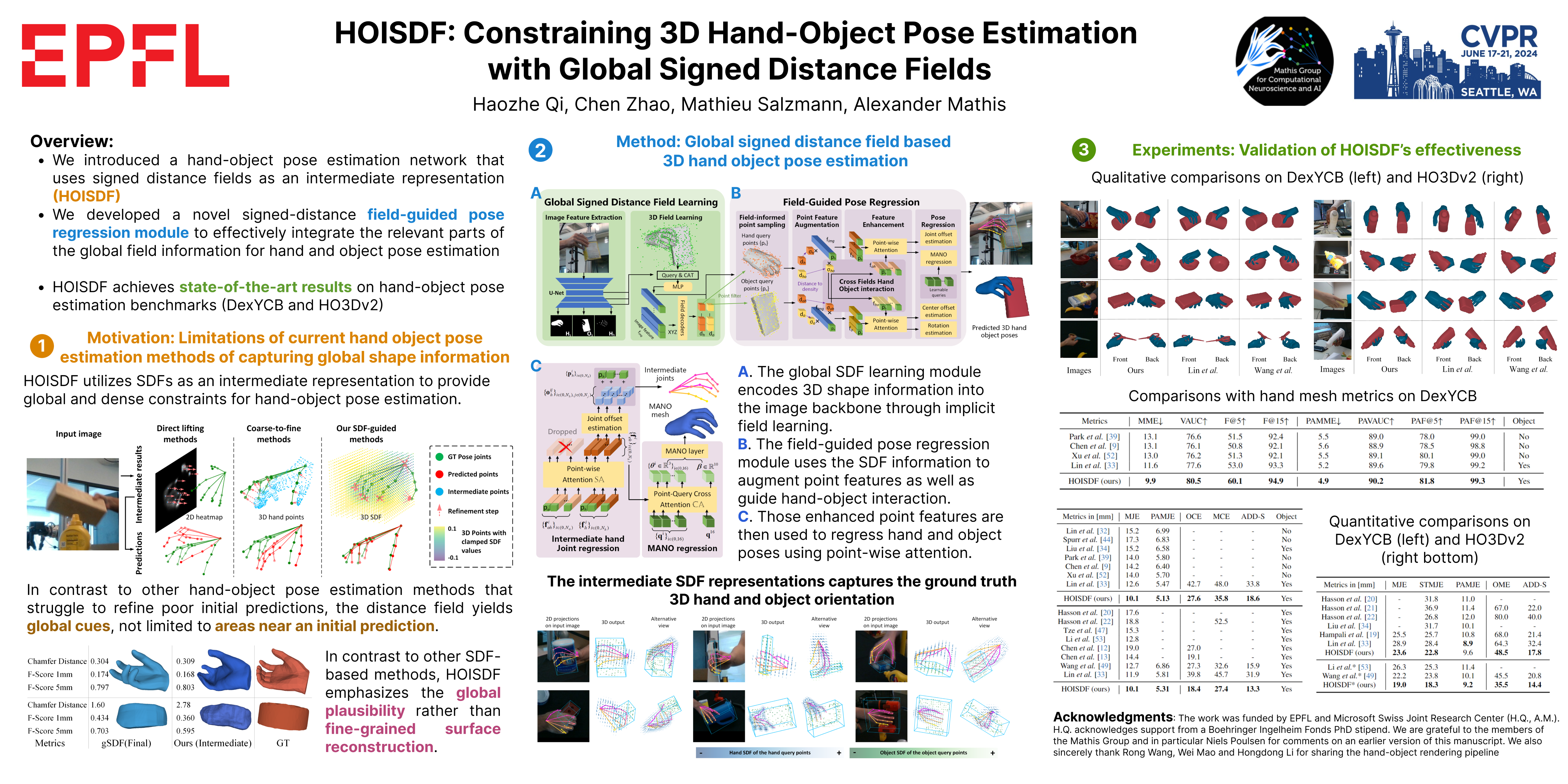
Human hands are highly articulated and versatile at handling objects. Jointly estimating the 3D poses of a hand and the object it manipulates from a monocular camera is challenging due to frequent occlusions. Thus, existing methods often rely on intermediate 3D shape representations to increase performance. These representations are typically explicit, such as 3D point clouds or meshes, and thus provide information in the direct surroundings of the intermediate hand pose estimate. To address this, we introduce HOISDF, a Signed Distance Field (SDF) guided hand-object pose estimation network, which jointly exploits hand and object SDFs to provide a global, implicit representation over the complete reconstruction volume. Specifically, the role of the SDFs is threefold: equip the visual encoder with implicit shape information, help to encode hand-object interactions, and guide the hand and object pose regression via SDF-based sampling and by augmenting the feature representations. We show that HOISDF achieves state-of-the-art results on hand-object pose estimation benchmarks (DexYCB and HO3Dv2).