Poster
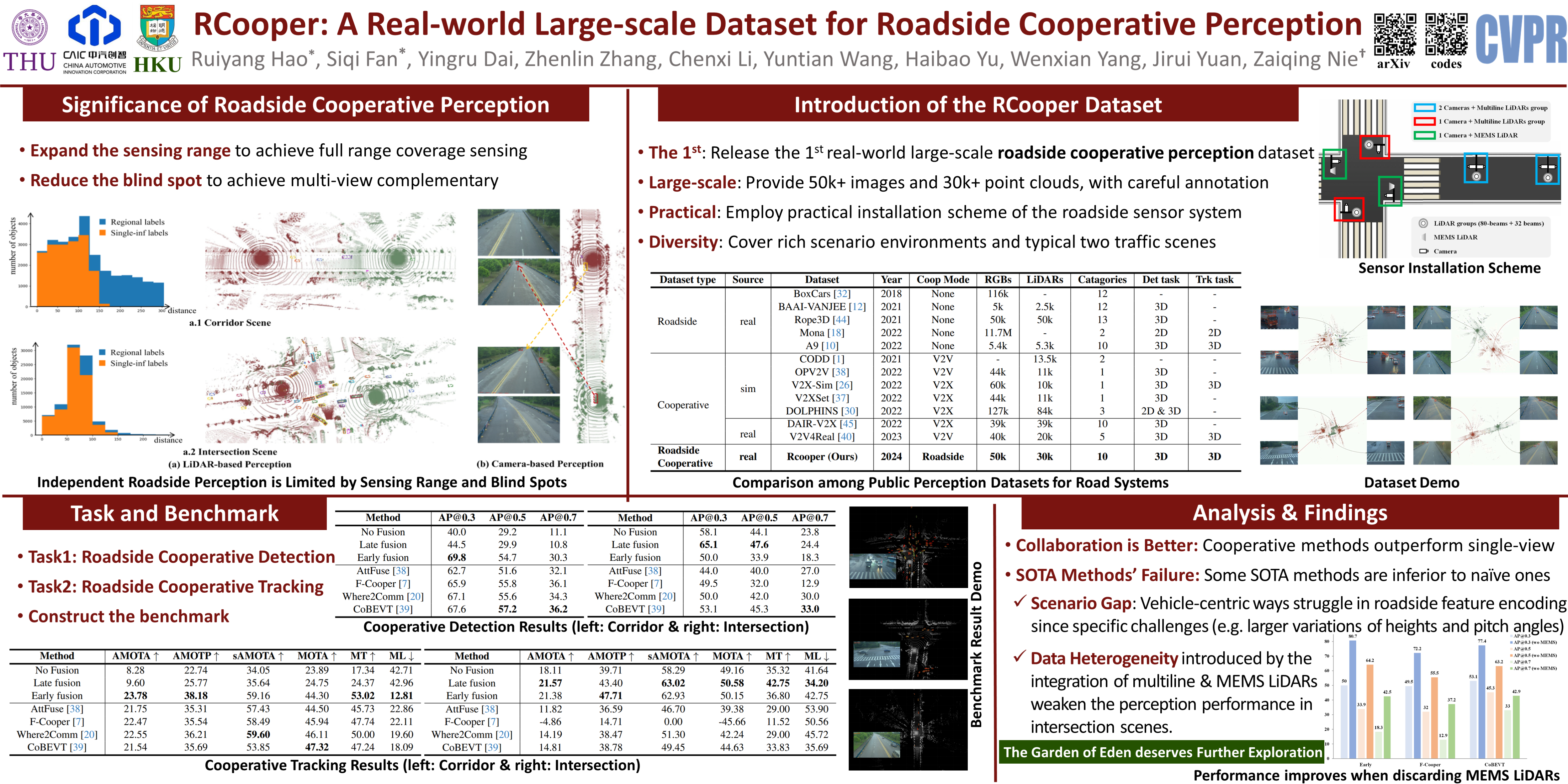
RCooper: A Real-world Large-scale Dataset for Roadside Cooperative Perception
Ruiyang Hao · Siqi Fan · Yingru Dai · Zhenlin Zhang · Chenxi Li · YuntianWang · Haibao Yu · Wenxian Yang · Jirui Yuan · Zaiqing Nie
Arch 4A-E Poster #269
{kind=link}
The value of roadside perception, which could extend the boundaries of autonomous driving and traffic management, has gradually become more prominent and acknowledged in recent years. However, existing roadside perception approaches only focus on the single-infrastructure sensor system, which cannot realize a comprehensive understanding of a traffic area because of the limited sensing range and blind spots. Orienting high-quality roadside perception, we need Roadside Cooperative Perception (RCooper) to achieve practical area-coverage roadside perception for restricted traffic areas. Rcooper has its own domain-specific challenges, but further exploration is hindered due to the lack of datasets. We hence release the first real-world, large-scale RCooper dataset to bloom the research on practical roadside cooperative perception, including detection and tracking. The manually annotated dataset comprises 50k images and 30k point clouds, including two representative traffic scenes (i.e., intersection and corridor). The constructed benchmarks prove the effectiveness of roadside cooperation perception and demonstrate the direction of further research. Codes and dataset can be accessed at: https://github.com/AIR-THU/DAIR-RCooper.