{kind=link}
Abstract:
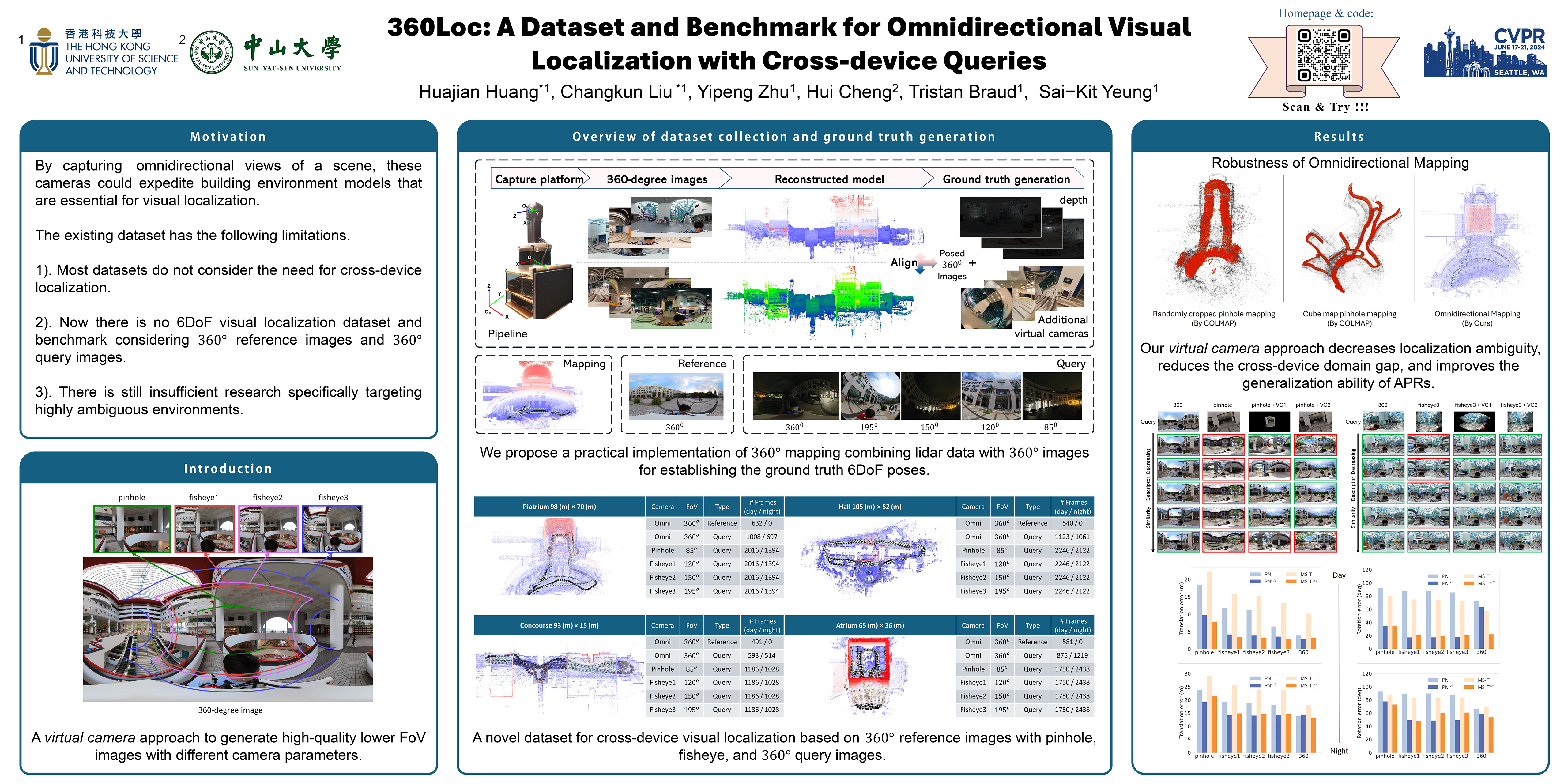
Portable 360$^\circ$ cameras are becoming a cheap and efficient tool to establish large visual databases. By capturing omnidirectional views of a scene, these cameras could expedite building environment models that are essential for visual localization. However, such an advantage is often overlooked due to the lack of valuable datasets. This paper introduces a new benchmark dataset, 360Loc, composed of 360$^\circ$ images with ground truth poses for visual localization. We present a practical implementation of 360$^\circ$ mapping combining 360$^\circ$ images with lidar data to generate the ground truth 6DoF poses. 360Loc is the first dataset and benchmark that explores the challenge of cross-device visual positioning, involving 360$^\circ$ reference frames, and query frames from pinhole, ultra-wide FoV fisheye, and 360$^\circ$ cameras. We propose a virtual camera approach to generate lower-FoV query frames from 360$^\circ$ images, which ensures a fair comparison of performance among different query types in visual localization tasks. We also extend this virtual camera approach to feature matching-based and pose regression-based methods to alleviate the performance loss caused by the cross-device domain gap, and evaluate its effectiveness against state-of-the-art baselines. We demonstrate that omnidirectional visual localization is more robust in challenging large-scale scenes with symmetries and repetitive structures. These results provide new insights into 360-camera mapping and omnidirectional visual localization with cross-device queries. Project Page and dataset: https://huajianup.github.io/research/360Loc/.
Chat is not available.