{kind=link}
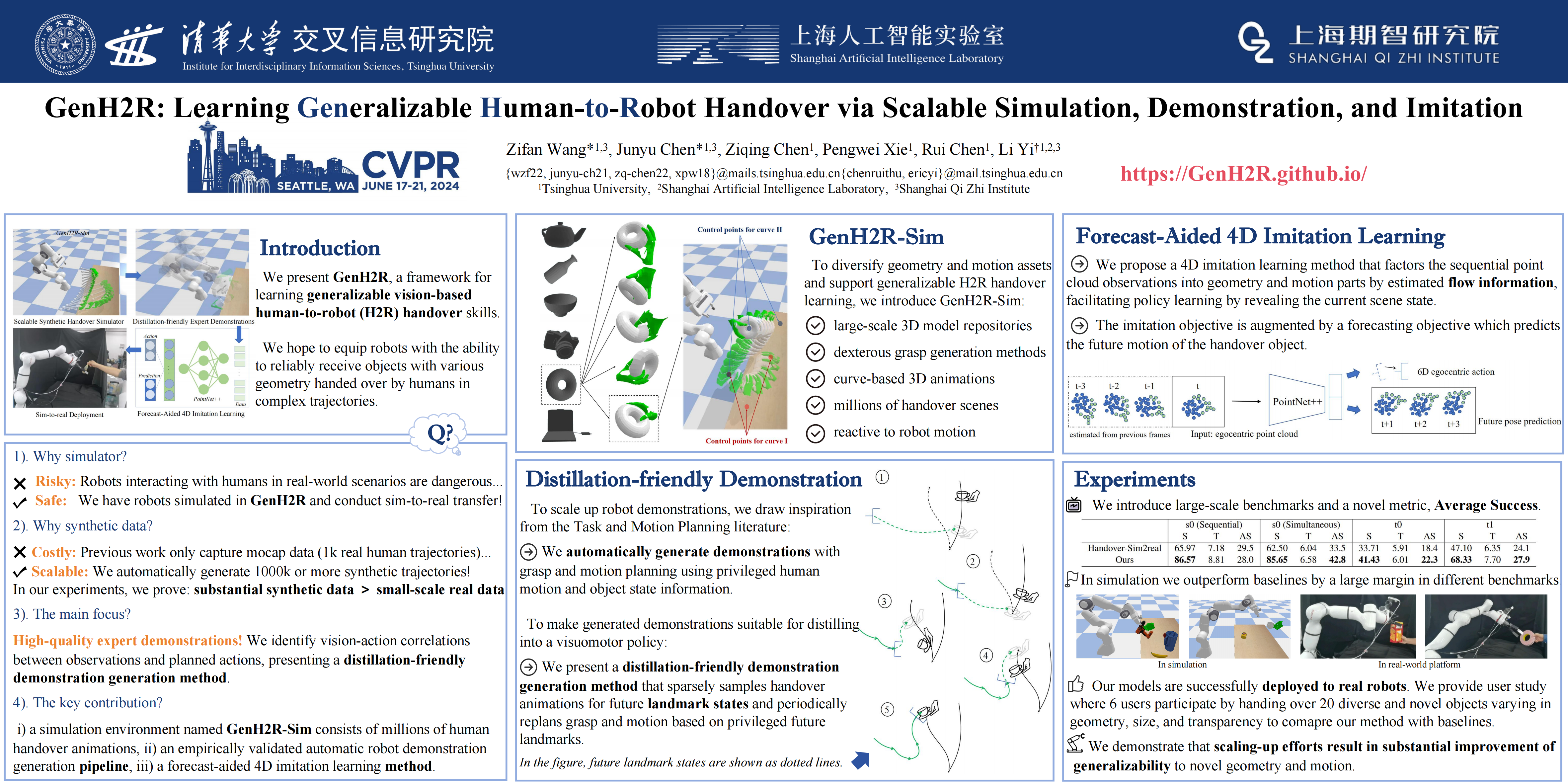
This paper presents GenH2R, a framework for learning generalizable vision-based human-to-robot (H2R) handover skills. The goal is to equip robots with the ability to reliably receive objects with unseen geometry handed over by humans in various complex trajectories. We acquire such generalizability by learning H2R handover at scale with a comprehensive solution including procedural simulation assets creation, automated demonstration generation, and effective imitation learning. We leverage large-scale 3D model repositories, dexterous grasp generation methods, and curve-based 3D animation to create an H2R handover simulation environment named GenH2R-Sim, surpassing the number of scenes in existing simulators by three orders of magnitude. We further introduce a distillation-friendly demonstration generation method that automatically generates a million high-quality demonstrations suitable for learning. Finally, we present a 4D imitation learning method augmented by a future forecasting objective to distill demonstrations into a visuo-motor handover policy. Experimental evaluations in both simulators and the real world demonstrate significant improvements (at least +10% success rate) over baselines in all cases.