{kind=link}
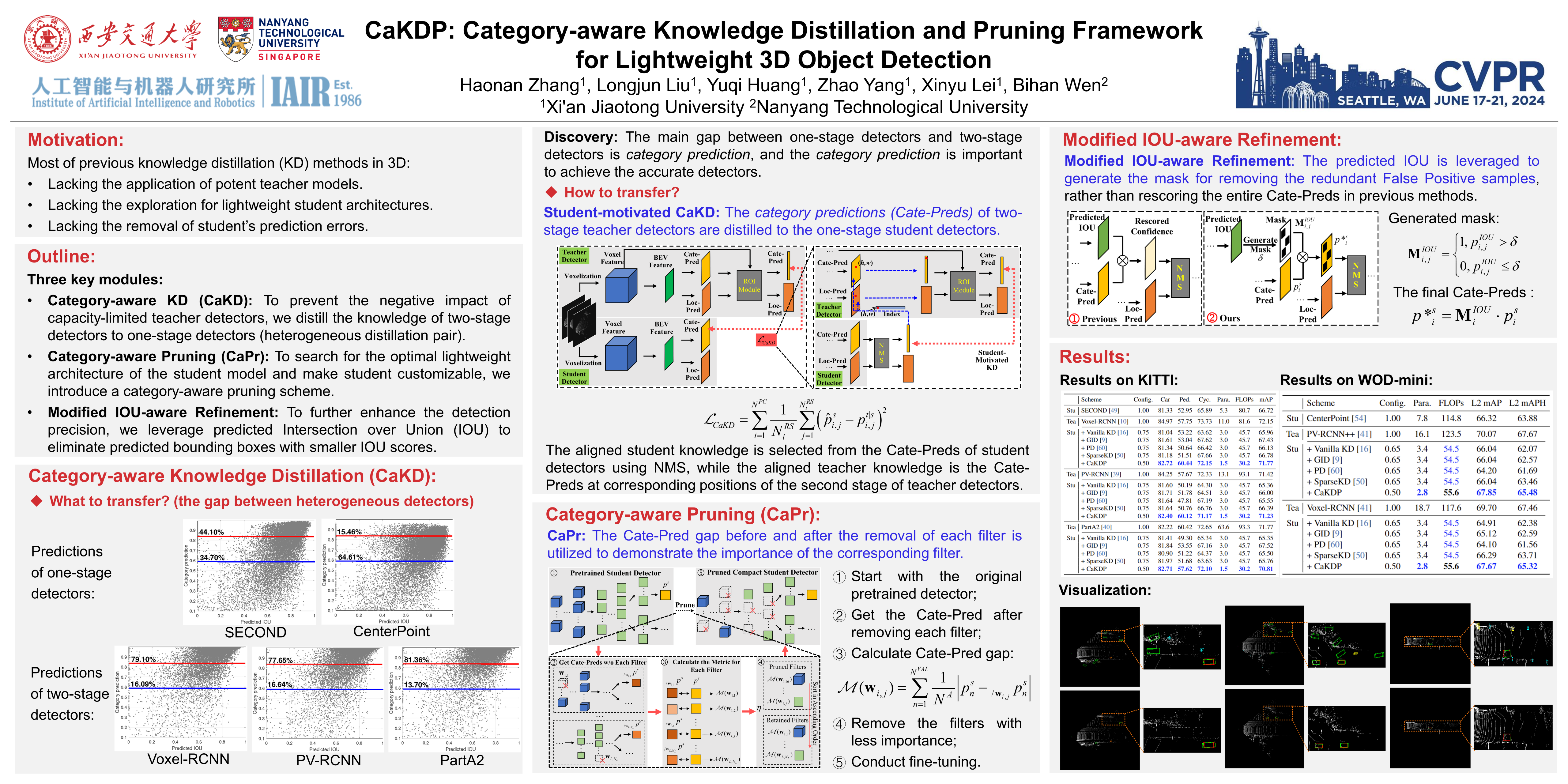
Knowledge distillation (KD) possesses immense potential to accelerate the deep neural networks (DNNs) for LiDAR-based 3D detection. However, in most of prevailing approaches, the suboptimal teacher models and insufficient student architecture investigations limit the performance gains. To address these issues, we propose a simple yet effective Category-aware Knowledge Distillation and Pruning (CaKDP) framework for compressing 3D detectors. Firstly, CaKDP transfers the knowledge of two-stage detector to one-stage student one, mitigating the impact of inadequate teacher models. To bridge the gap between the heterogeneous detectors, we investigate their differences, and then introduce the student-motivated category-aware KD to align the category prediction between distillation pairs. Secondly, we propose a category-aware pruning scheme to obtain the customizable architecture of compact student model. The method calculates the category prediction gap before and after removing each filter to evaluate the importance of filters, and retains the important filters. Finally, to further improve the student performance, a modified IOU-aware refinement module with negligible computations is leveraged to remove the redundant false positive predictions. Experiments demonstrate that CaKDP achieves the compact detector with high performance. For example, on WOD, CaKDP accelerates CenterPoint by half while boosting L2 mAPH by 1.61%. The code is available at https://github.com/zhnxjtu/CaKDP.