{kind=link}
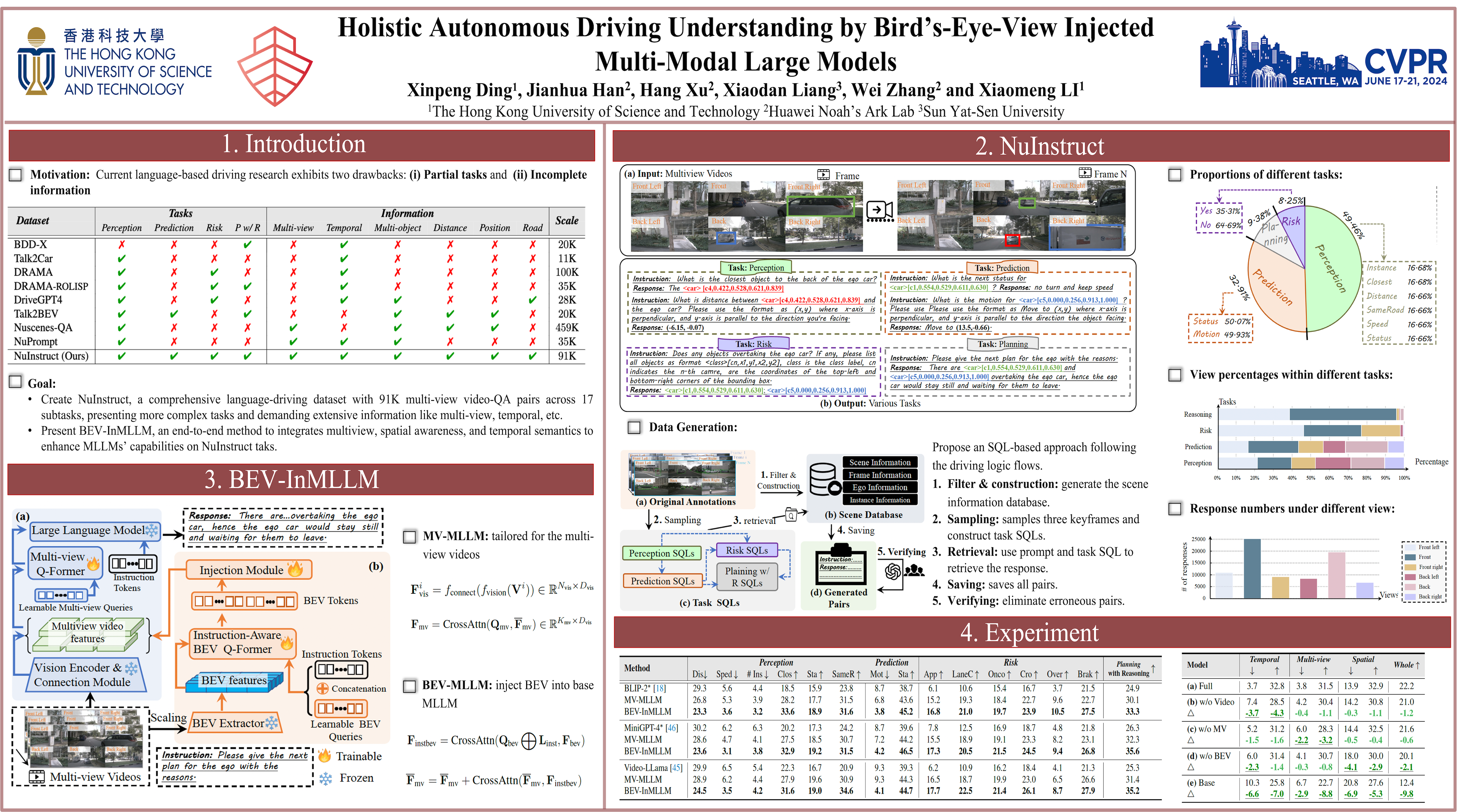
The rise of multimodal large language models (MLLMs) has spurred interest in language-based driving tasks. However, existing research typically focuses on limited tasks and often omits key multi-view and temporal information which is crucial for robust autonomous driving. To bridge these gaps, we introduce NuInstruct, a novel dataset with 91K multi-view video-QA pairs across 17 subtasks, where each task demands holistic information (e.g., temporal, multi-view, and spatial), significantly elevating the challenge level. To obtain NuInstruct, we propose a novel SQL-based method to generate instruction-response pairs automatically, which is inspired by the driving logical progression of humans. We further present BEV-InMLLM, an end-to-end method for efficiently deriving instruction-aware Bird’s-Eye-View (BEV) features, language-aligned for large language models. BEV-InMLLM integrates multi-view, spatial awareness, and temporal semantics to enhance MLLMs' capabilities on NuInstruct tasks. Moreover, our proposed BEV injection module is a plug-and-play method for existing MLLMs. Our experiments on NuInstruct demonstrate that BEV-InMLLM significantly outperforms existing MLLMs, e.g. ~9% improvement on various tasks. We plan to release our \dataset~for future research development.