Poster
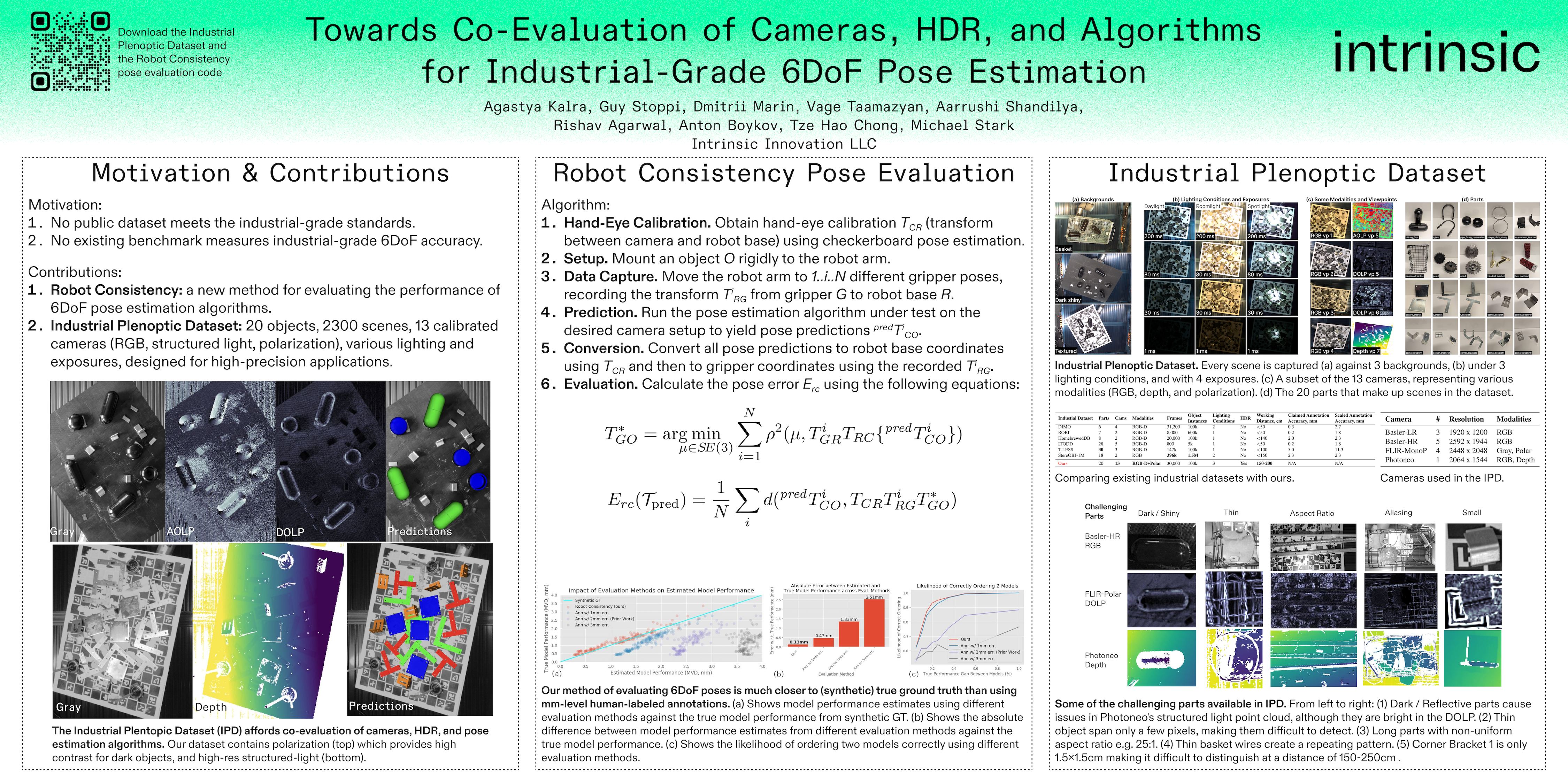
Towards Co-Evaluation of Cameras HDR and Algorithms for Industrial-Grade 6DoF Pose Estimation
Agastya Kalra · Guy Stoppi · Dmitrii Marin · Vage Taamazyan · Aarrushi Shandilya · Rishav Agarwal · Anton Boykov · Aaron Chong · Michael Stark
Arch 4A-E Poster #305
{kind=link}
Abstract:
6DoF Pose estimation has been gaining increased importance in vision for over a decade, however it does not yet meet the reliability and accuracy standards for mass deployment in industrial robotics. To this effect, we present the first dataset and evaluation method for the co-evaluation of cameras, HDR, and algorithms targeted at reliable, high-accuracy industrial automation. Specifically, we capture 2,300 physical scenes of 22 industrial parts covering a $1m\times 1m\times 0.5m$ working volume, resulting in over 100,000 distinct object views. Each scene is captured with 13 well-calibrated multi-modal cameras including polarization and high-resolution structured light. In terms of lighting, we capture each scene at 4 exposures and in 3 challenging lighting conditions ranging from 100 lux to 100,000 lux. We also present, validate, and analyze robot consistency, an evaluation method targeted at scalable, high accuracy evaluation. We hope that vision systems that succeed on this dataset will have direct industry impact.
Chat is not available.