Poster
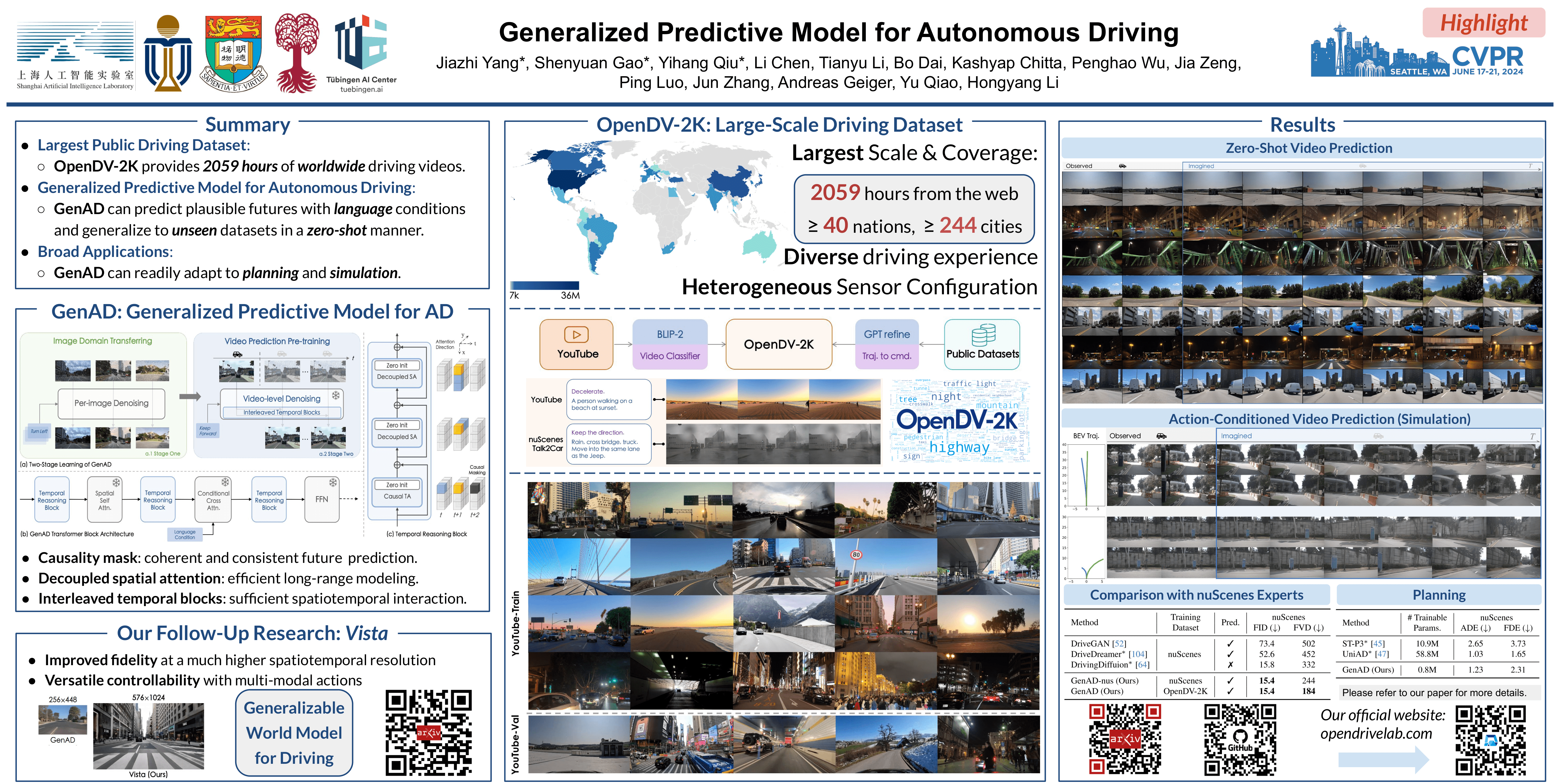
Generalized Predictive Model for Autonomous Driving
Jiazhi Yang · Shenyuan Gao · Yihang Qiu · Li Chen · Tianyu Li · Bo Dai · Kashyap Chitta · Penghao Wu · Jia Zeng · Ping Luo · Jun Zhang · Andreas Geiger · Yu Qiao · Hongyang Li
Arch 4A-E Poster #5

{kind=link}
In this paper, we introduce the first large-scale video prediction model in the autonomous driving discipline. To eliminate the restriction of high-cost data collection and empower the generalization ability of our model, we acquire massive data from the web and pair it with diverse and high-quality text descriptions. The resultant dataset accumulates over 2000 hours of driving videos, spanning areas all over the world with diverse weather conditions and traffic scenarios. Inheriting the merits from recent latent diffusion models, our model, dubbed GenAD, handles the challenging dynamics in driving scenes with novel temporal reasoning blocks. We showcase that it can generalize to various unseen driving datasets in a zero-shot manner, surpassing general or driving-specific video prediction counterparts. Furthermore, GenAD can be adapted into an action-conditioned prediction model or a motion planner, holding great potential for real-world driving applications.