Poster
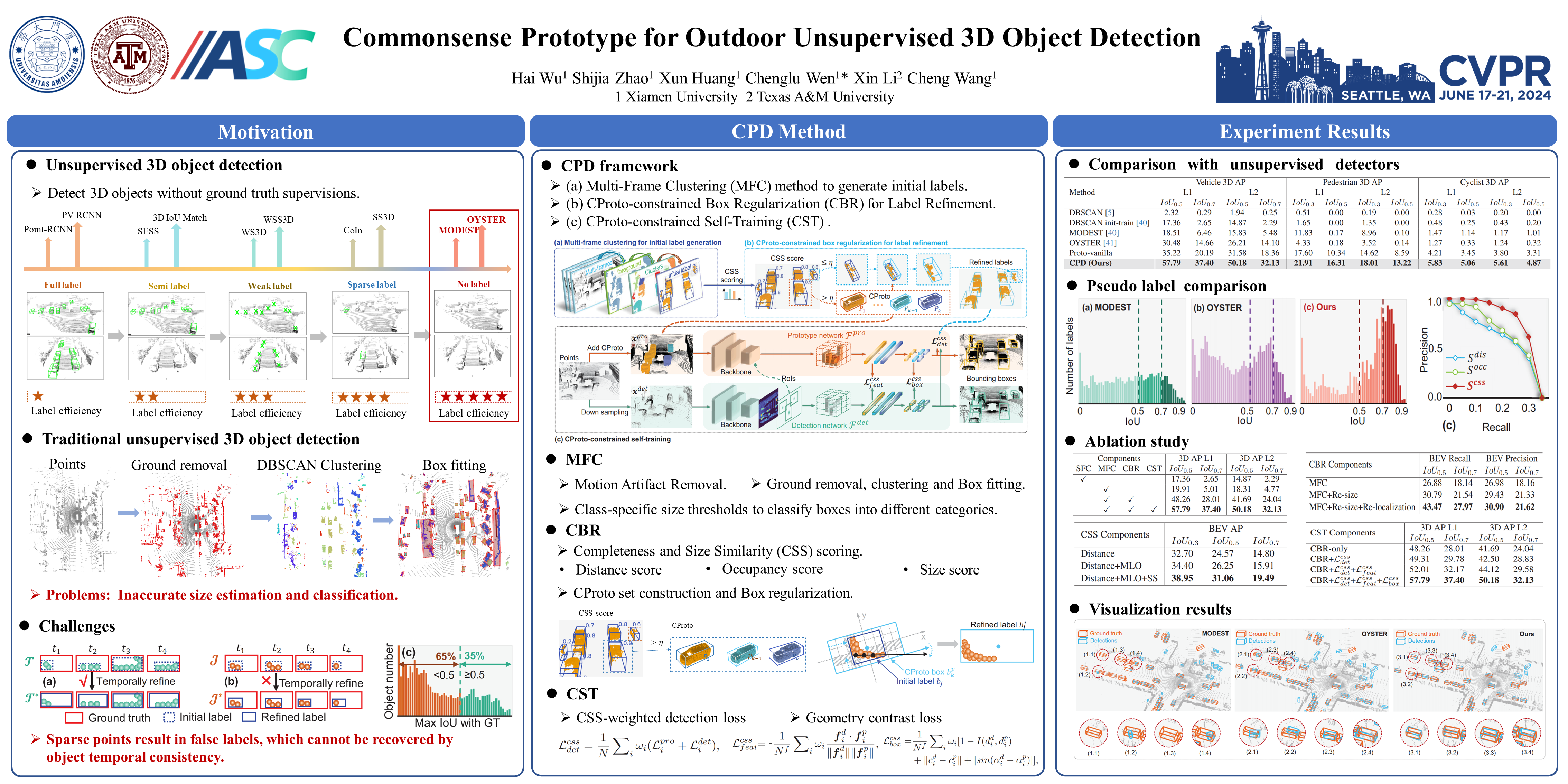
Commonsense Prototype for Outdoor Unsupervised 3D Object Detection
Hai Wu · Shijia Zhao · Xun Huang · Chenglu Wen · Xin Li · Cheng Wang
Arch 4A-E Poster #35
{kind=link}
Recently, unsupervised 3D object detection for autonomous driving gained great attention. The prevalent approaches primarily follow cluster-based pseudo-label generation and iterative self-training processes. However, the challenge arises due to the sparsity of LiDAR scans, which leads to pseudo-labels with erroneous size and position, resulting in subpar detection performance. To tackle this problem, this paper introduces a Commonsense Prototype-based Detector, termed CPD, for unsupervised 3D object detection. CPD first constructs Commonsense Prototype (CProto) characterized by high-quality bounding box and dense points, based on commonsense intuition. Subsequently, CPD refines the low-quality pseudo-labels by leveraging the size prior from CProto. Furthermore, CPD enhances the detection accuracy of sparsely scanned objects by the geometric knowledge from CProto. CPD outperforms state-of-the-art unsupervised 3D detectors on Waymo Open Dataset (WOD), PandaSet, and KITTI datasets by a large margin. For the first time, our unsupervised CPD surpasses some weakly supervised approaches. Besides, by training CPD on WOD and testing on KITTI, CPD attains 90.85% and 81.01% 3D Average Precision on easy and moderate car classes, respectively. These achievements position CPD in close proximity to fully supervised detectors, highlighting the significance of our method. The code will be made publicly available.