{kind=link}
Abstract:
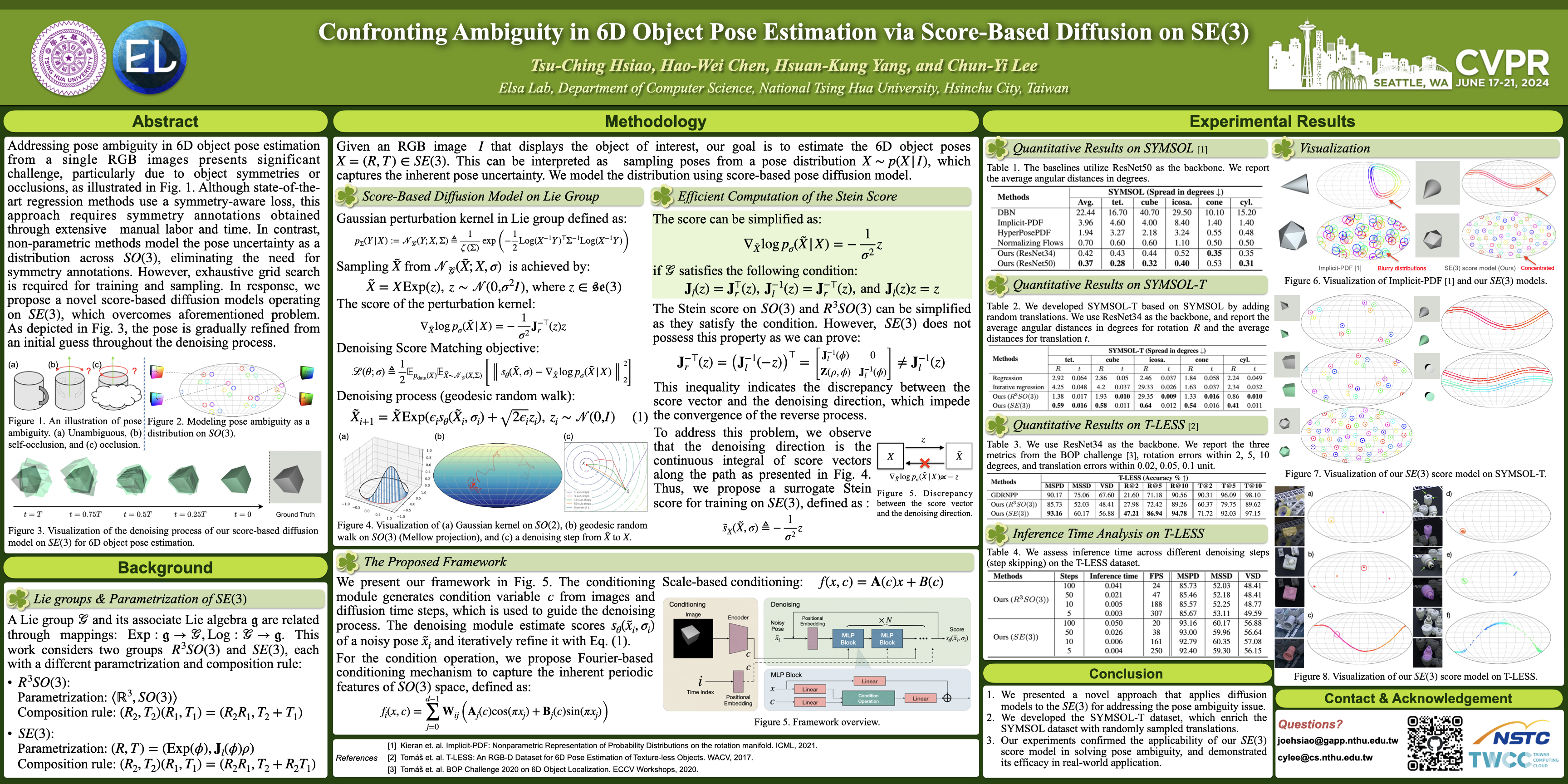
Addressing pose ambiguity in 6D object pose estimation from single RGB images presents a significant challenge, particularly due to object symmetries or occlusions. In response, we introduce a novel score-based diffusion method applied to the $SE(3)$ group, marking the first application of diffusion models to $SE(3)$ within the image domain, specifically tailored for pose estimation tasks. Extensive evaluations demonstrate the method's efficacy in handling pose ambiguity, mitigating perspective-induced ambiguity, and showcasing the robustness of our surrogate Stein score formulation on $SE(3)$. This formulation not only improves the convergence of denoising process but also enhances computational efficiency. Thus, we pioneer a promising strategy for 6D object pose estimation.
Chat is not available.