{kind=link}
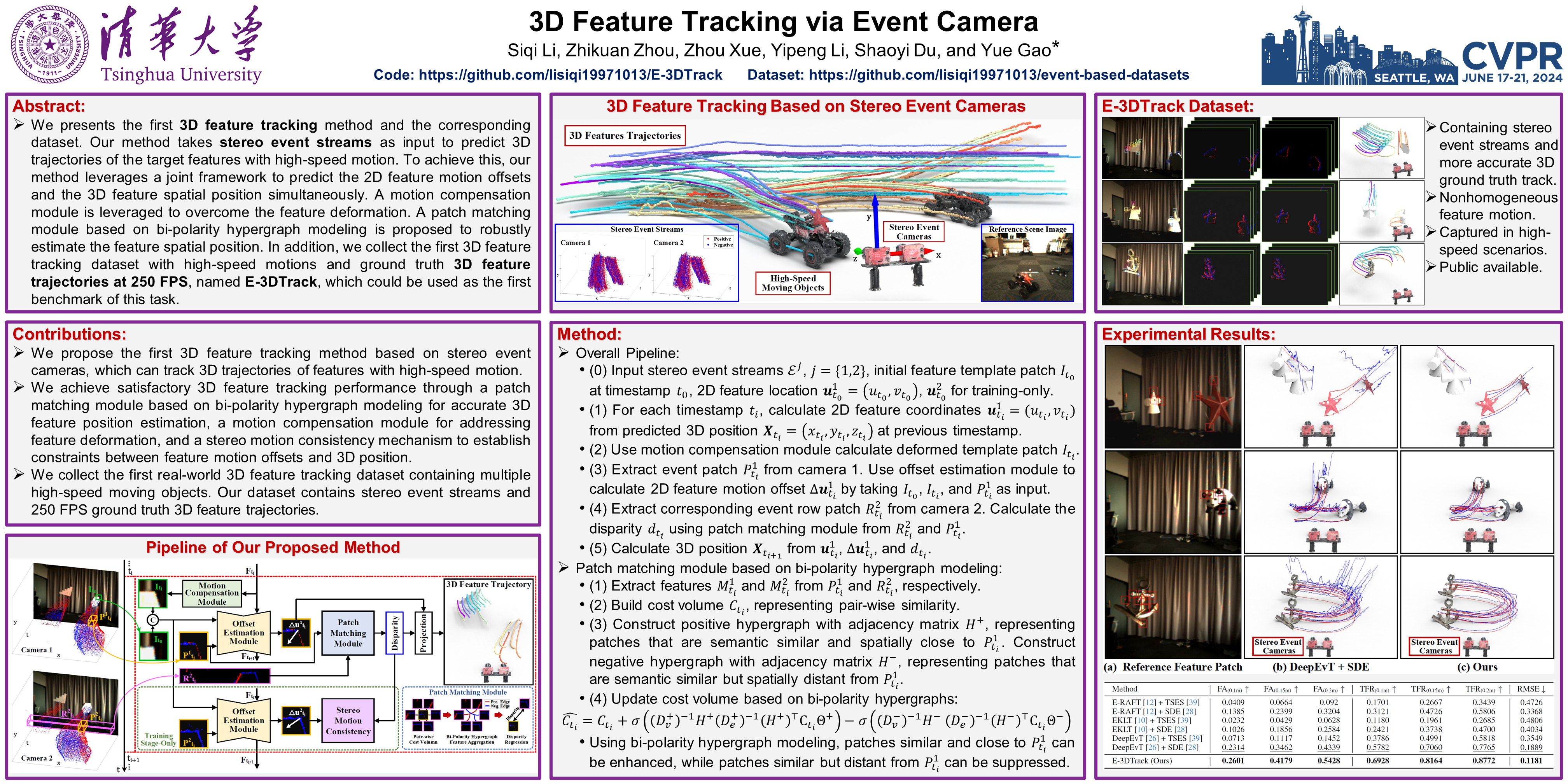
This paper presents the first 3D feature tracking method with the corresponding dataset. Our proposed method takes event streams from stereo event cameras as input to predict 3D trajectories of the target features with high-speed motion. To achieve this, our method leverages a joint framework to predict the 2D feature motion offsets and the 3D feature spatial position simultaneously. A motion compensation module is leveraged to overcome the feature deformation. A patch matching module based on bi-polarity hypergraph modeling is proposed to robustly estimate the feature spatial position. Meanwhile, we collect the first 3D feature tracking dataset with high-speed moving objects and ground truth 3D feature trajectories at 250 FPS, named E-3DTrack, which can be used as the first high-speed 3D feature tracking benchmark. Our code and dataset could be found at: https://github.com/lisiqi19971013/E-3DTrack.