
{kind=link}
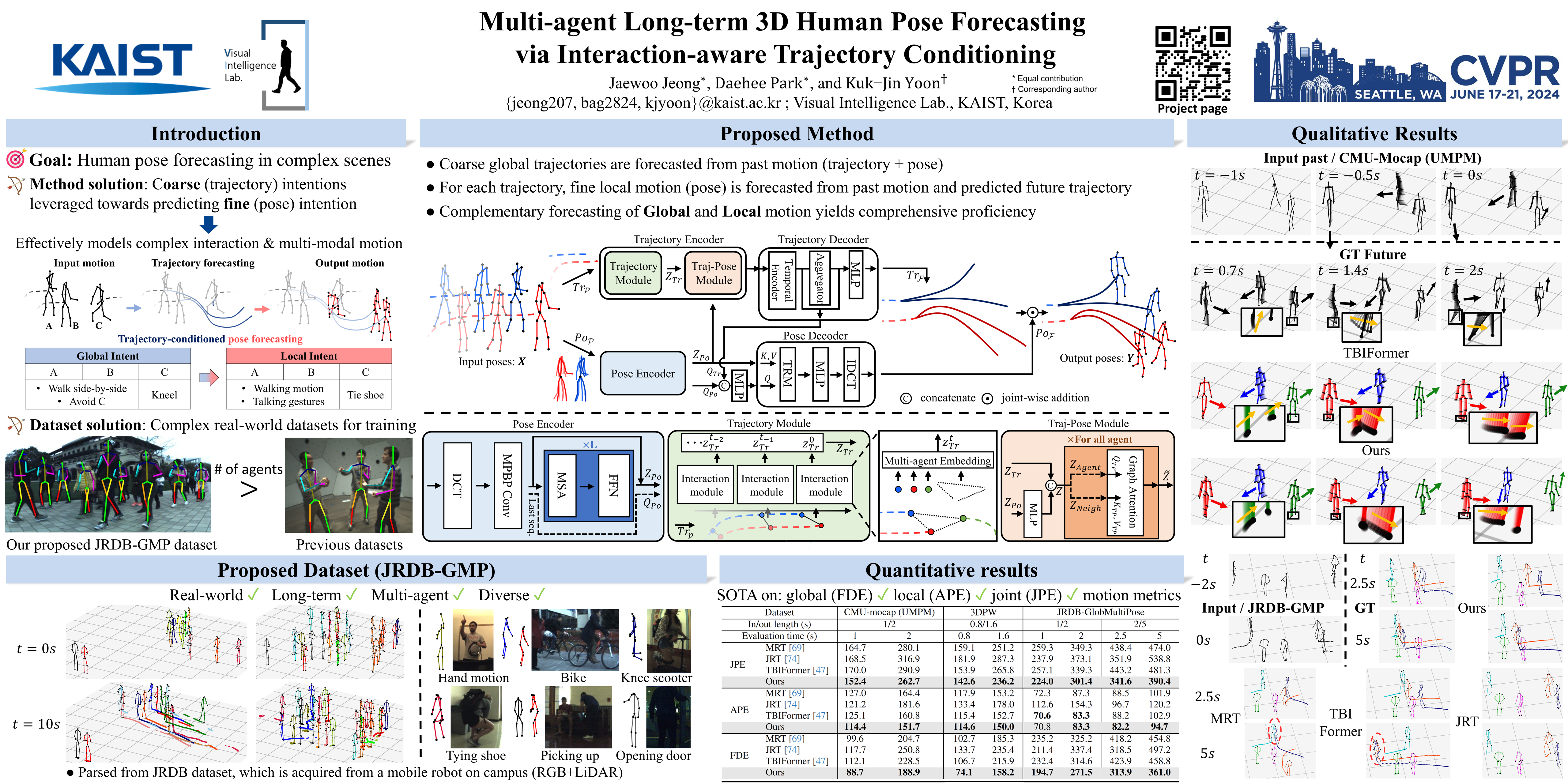
Human pose forecasting garners attention for its diverse applications.However, challenges in modeling the multi-modal nature of human motion and intricate interactions among agents persist, particularly with longer timescales and more agents.In this paper, we propose an interaction-aware trajectory-conditioned long-term multi-agent human pose forecasting model, utilizing a coarse-to-fine prediction approach: multi-modal global trajectories are initially forecasted, followed by respective local pose forecasts conditioned on each mode.In doing so, our Trajectory2Pose model introduces a graph-based agent-wise interaction module for a reciprocal forecast of local motion-conditioned global trajectory and trajectory-conditioned local pose.Our model effectively handles the multi-modality of human motion and the complexity of long-term multi-agent interactions, improving performance in complex environments.Furthermore, we address the lack of long-term (6s+) multi-agent (5+) datasets by constructing a new dataset from real-world images and 2D annotations, enabling a comprehensive evaluation of our proposed model.State-of-the-art prediction performance on both complex and simpler datasets confirms the generalized effectiveness of our method.