{kind=link}
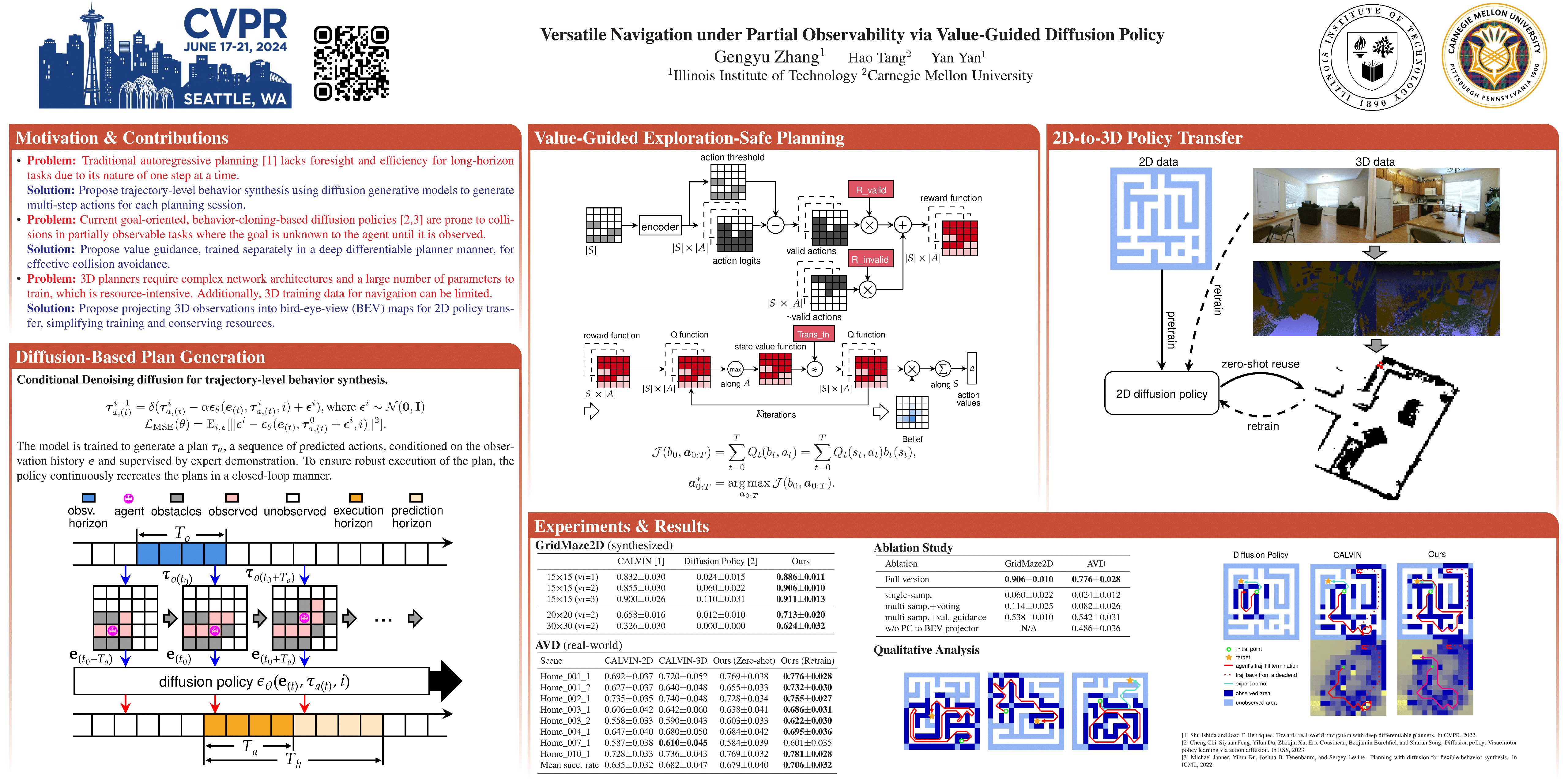
Route planning for navigation under partially observability plays a crucial role in modern robotics and autonomous driving. Existing route plannings can be categorized into two main classes: traditional autoregressive and diffusion-based methods. The former often fails due to its myopic nature, while the latter either assumes full observability or struggles to adapt to unfamiliar scenarios, due to strong couplings with behavior cloning from experts. To address these deficiencies, we propose a versatile diffusion-based approach for both 2D and 3D route planning under partial observability. Specifically, our value-guided diffusion policy first generates plans to predict actions across various timesteps, providing ample foresight to the planning. It then employs a differentiable planner with state estimations to derive a value function, directing the agent's exploration and goal-seeking behaviors without seeking for experts while explicitly addressing partial observability. During inference, our policy is further enhanced by a best-plan-selection strategy, substantially boosting the planning success rate. Moreover, we propose projecting point cloud, derived from RGB-D inputs, onto 2D grid-based bird-eye-view maps via semantic segmentation, generalizing to 3D environments. This simple yet effective adaption enables zero-shot transfer from 2D-trained policy to 3D, cutting across the laborious training for 3D policy, and thus certifying our versatility. Experimental results demonstrate our superior performance, particularly in navigating situations beyond expert demonstrations, surpassing state-of-the-art autoregressive and diffusion-based baselines for both 2D and 3D scenarios.