Poster
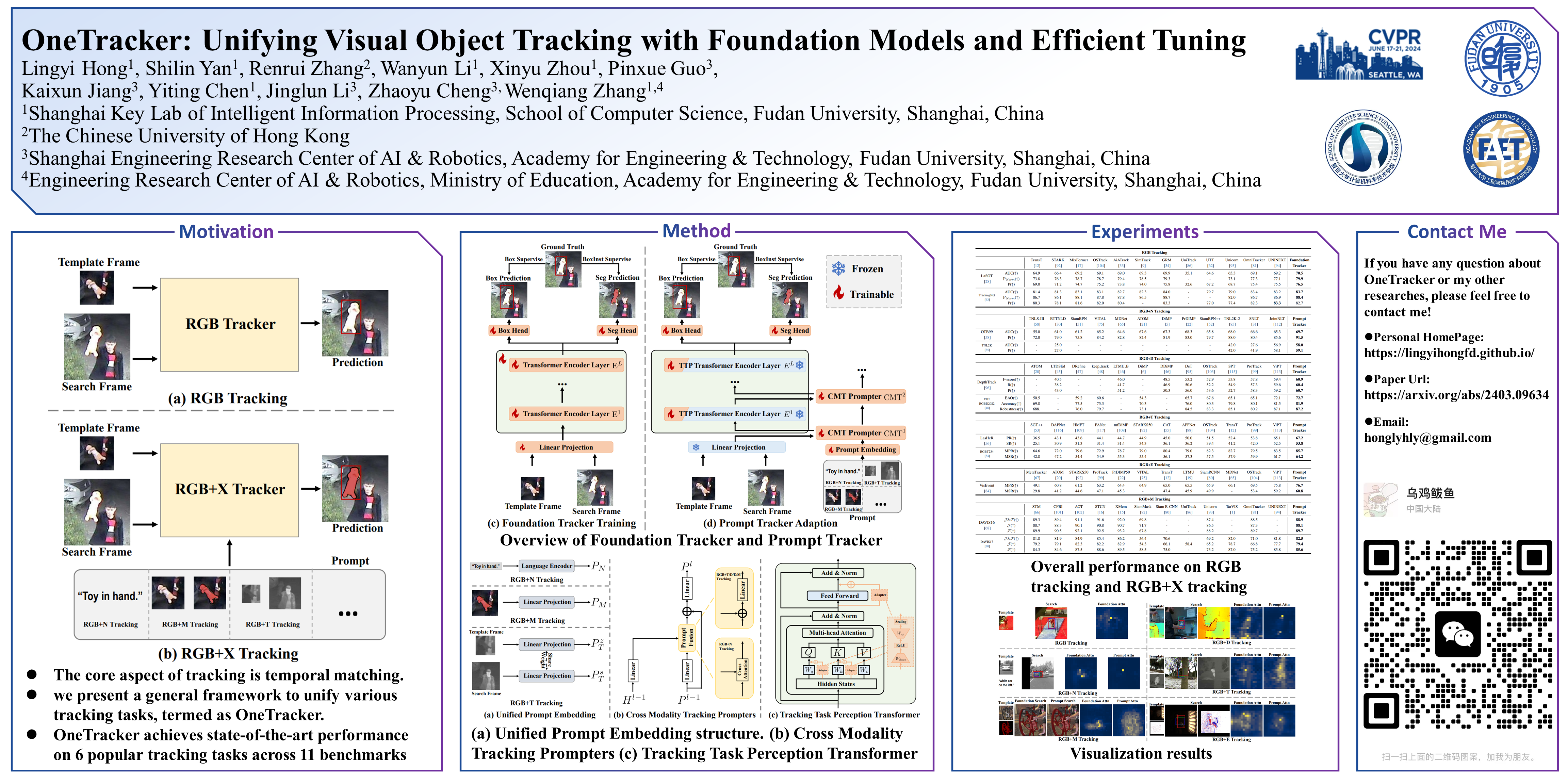
OneTracker: Unifying Visual Object Tracking with Foundation Models and Efficient Tuning
Lingyi Hong · Shilin Yan · Renrui Zhang · Wanyun Li · Xinyu Zhou · Pinxue Guo · Kaixun Jiang · Yiting Cheng · Jinglun Li · Zhaoyu Chen · Wenqiang Zhang
Arch 4A-E Poster #432

{kind=link}
Visual object tracking aims to localize the target object of each frame based on its initial appearance in the first frame. Depending on the input modility, tracking tasks can be divided into RGB tracking and RGB+X (e.g. RGB+N, and RGB+D) tracking. Despite the different input modalities, the core aspect of tracking is the temporal matching. Based on this common ground, we present a general framework to unify various tracking tasks, termed as OneTracker. OneTracker first performs a large-scale pre-training on a RGB tracker called Foundation Tracker. This pretraining phase equips the Foundation Tracker with a stable ability to estimate the location of the target object. Then we regard other modality information as prompt and build Prompt Tracker upon Foundation Tracker. Through freezing the Foundation Tracker and only adjusting some additional trainable parameters, Prompt Tracker inhibits the strong localization ability from Foundation Tracker and achieves parameter-efficient finetuning on downstream RGB+X tracking tasks. To evaluate the effectiveness of our general framework OneTracker, which is consisted of Foundation Tracker and Prompt Tracker, we conduct extensive experiments on 6 popular tracking tasks across 11 benchmarks and our OneTracker outperforms other models and achieves state-of-the-art performance.