{kind=link}
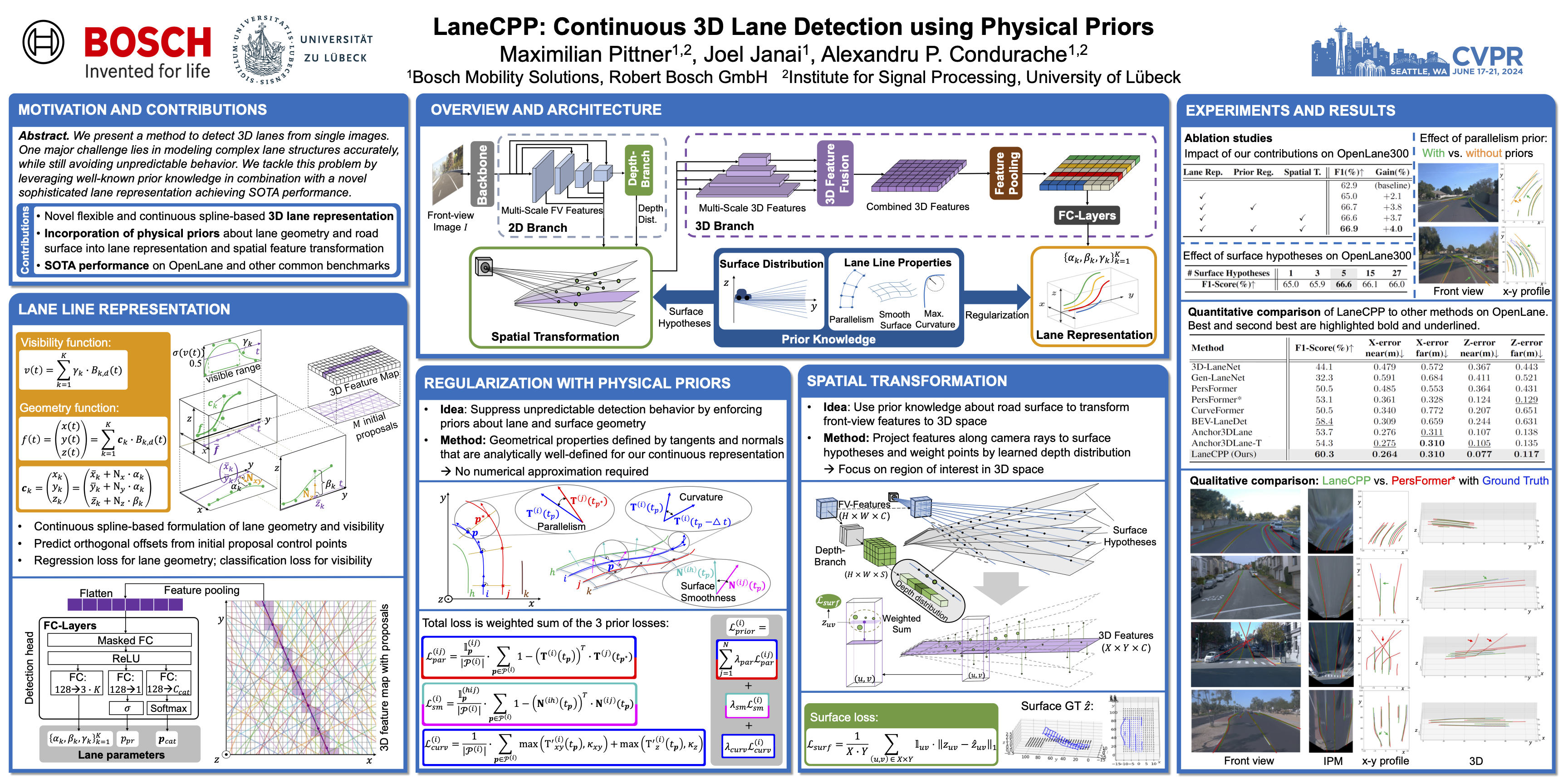
Monocular 3D lane detection has become a fundamental problem in the context of autonomous driving, which comprises the tasks of finding the road surface and locating lane markings. One major challenge lies in a flexible but robust line representation capable of modeling complex lane structures, while still avoiding unpredictable behavior. While previous methods rely on fully data-driven approaches, we instead introduce a novel approach LaneCPP that uses a continuous 3D lane detection model leveraging physical prior knowledge about the lane structure and road geometry. While our sophisticated lane model is capable of modeling complex road structures, it also shows robust behavior since physical constraints are incorporated by means of a regularization scheme that can be analytically applied to our parametric representation. Moreover, we incorporate prior knowledge about the road geometry into the 3D feature space by modeling geometry-aware spatial features, guiding the network to learn an internal road surface representation. In our experiments, we show the benefits of our contributions and prove the meaningfulness of using priors to make 3D lane detection more robust. The results show that LaneCPP achieves state-of-the-art performance in terms of F-Score and geometric errors.