{kind=link}
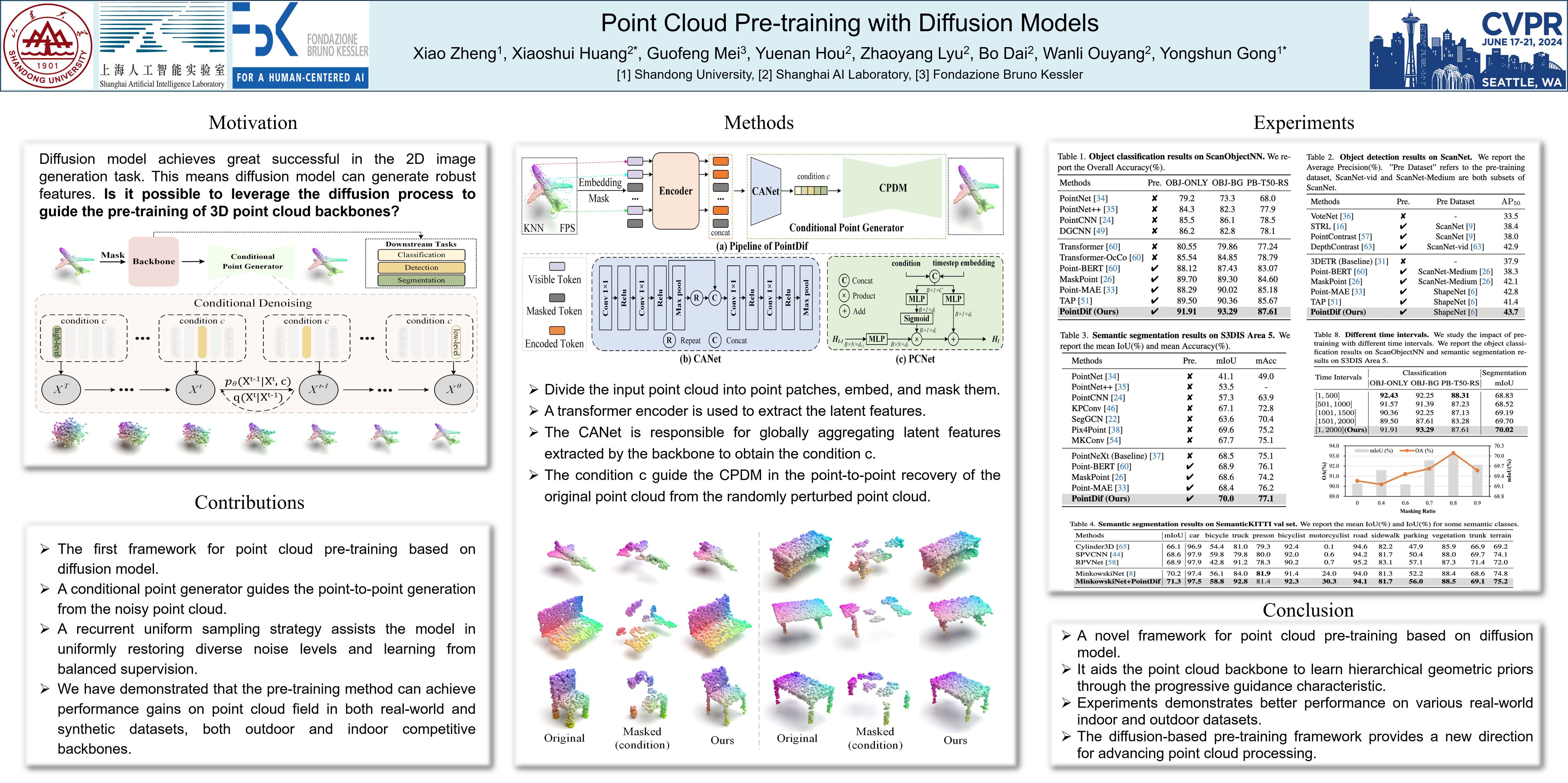
Pre-training a model and then fine-tuning it on downstream tasks has demonstrated significant success in the 2D image and NLP domains. However, due to the unordered and non-uniform density characteristics of point clouds, it is non-trivial to explore the prior knowledge of point clouds and pre-train a point cloud backbone. In this paper, we propose a novel pre-training method called Point cloud Diffusion pre-training (PointDif). We consider the point cloud pre-training task as a conditional point-to-point generation problem and introduce a conditional point generator. This generator aggregates the features extracted by the backbone and employs them as the condition to guide the point-to-point recovery from the noisy point cloud, thereby assisting the backbone in capturing both local and global geometric priors as well as the global point density distribution of the object. We also present a recurrent uniform sampling optimization strategy, which enables the model to uniformly recover from various noise levels and learn from balanced supervision. Our PointDif achieves substantial improvement across various real-world datasets for diverse downstream tasks such as classification, segmentation and detection. Specifically, PointDif attains 70.0% mIoU on S3DIS Area 5 for the segmentation task and achieves an average improvement of 2.4% on ScanObjectNN for the classification task compared to TAP. Furthermore, our pre-training framework can be flexibly applied to diverse point cloud backbones and bring considerable gains.