{kind=link}
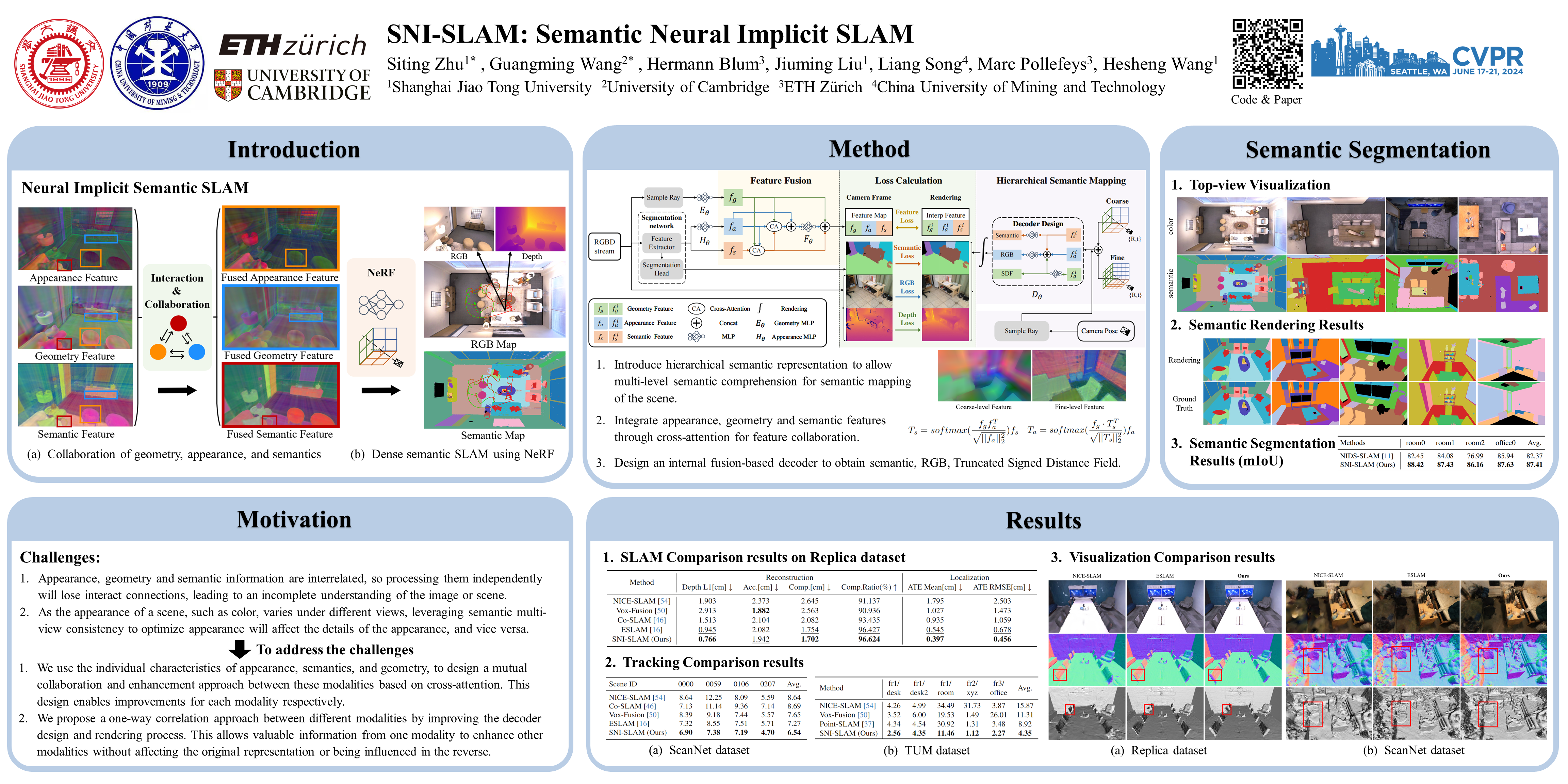
We propose SNI-SLAM, a semantic SLAM system utilizing neural implicit representation, that simultaneously performs accurate semantic mapping, high-quality surface reconstruction, and robust camera tracking. In this system, we introduce hierarchical semantic representation to allow multi-level semantic comprehension for top-down structured semantic mapping of the scene. In addition, to fully utilize the correlation between multiple attributes of the environment, we integrate appearance, geometry and semantic features through cross-attention for feature collaboration. This strategy enables a more multifaceted understanding of the environment, thereby allowing SNI-SLAM to remain robust even when single attribute is defective. Then, we design an internal fusion-based decoder to obtain semantic, RGB, Truncated Signed Distance Field (TSDF) values from multi-level features for accurate decoding. Furthermore, we propose a feature loss to update the scene representation at the feature level. Compared with low-level losses such as RGB loss and depth loss, our feature loss is capable of guiding the network optimization on a higher-level. Our SNI-SLAM method demonstrates superior performance over all recent NeRF-based SLAM methods in terms of mapping and tracking accuracy on Replica and ScanNet datasets, while also showing excellent capabilities in accurate semantic segmentation and real-time semantic mapping. Codes will be available at https://github.com/IRMVLab/SNI-SLAM.