{kind=link}
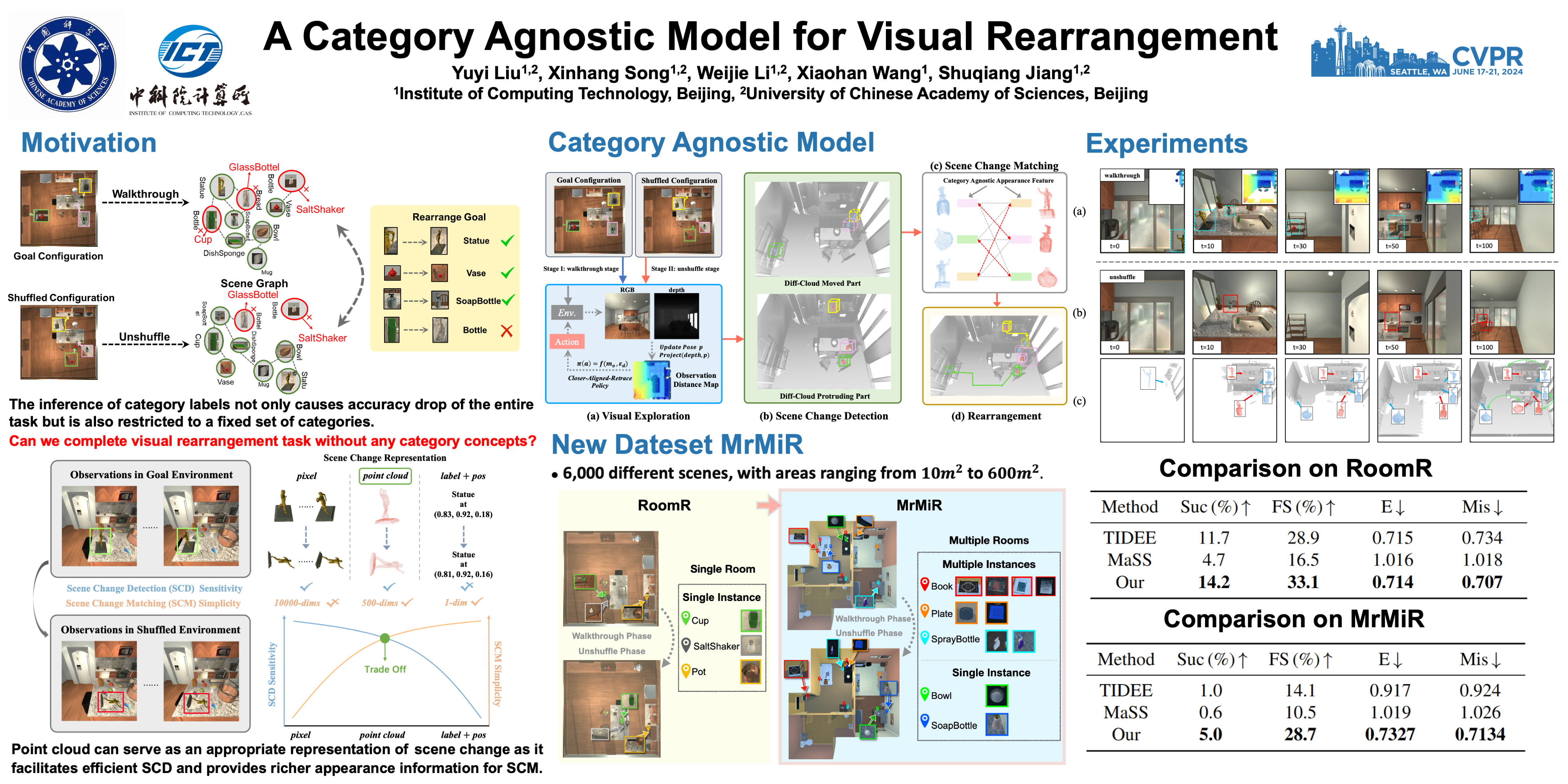
This paper presents a novel category agnostic model for visual rearrangement task, which can help an embodied agent to physically recover the shuffled scene configuration without any category concepts to the goal configuration. Previous methods usually follow a similar architecture, completing the rearrangement task by aligning the scene changes of the goal and shuffled configuration, according to the semantic scene graphs. However, constructing scene graphs requires the inference of category labels, which not only causes the accuracy drop of the entire task but also limits the application in real world scenario. In this paper, we delve deep into the essence of visual rearrangement task and focus on the two most essential issues, scene change detection and scene change matching. We utilize the movement and the protrusion of point cloud to accurately identify the scene changes and match these changes depending on the similarity of category agnostic appearance feature. Moreover, to assist the agent to explore the environment more efficiently and comprehensively, we propose a closer-aligned-retrace exploration policy, aiming to observe more details of the scene at a closer distance. We conduct extensive experiments on AI2THOR Rearrangement Challenge based on RoomR dataset and a new multi-room multi-instance dataset MrMiR collected by us. The experimental results demonstrate the effectiveness of our proposed method.