Poster
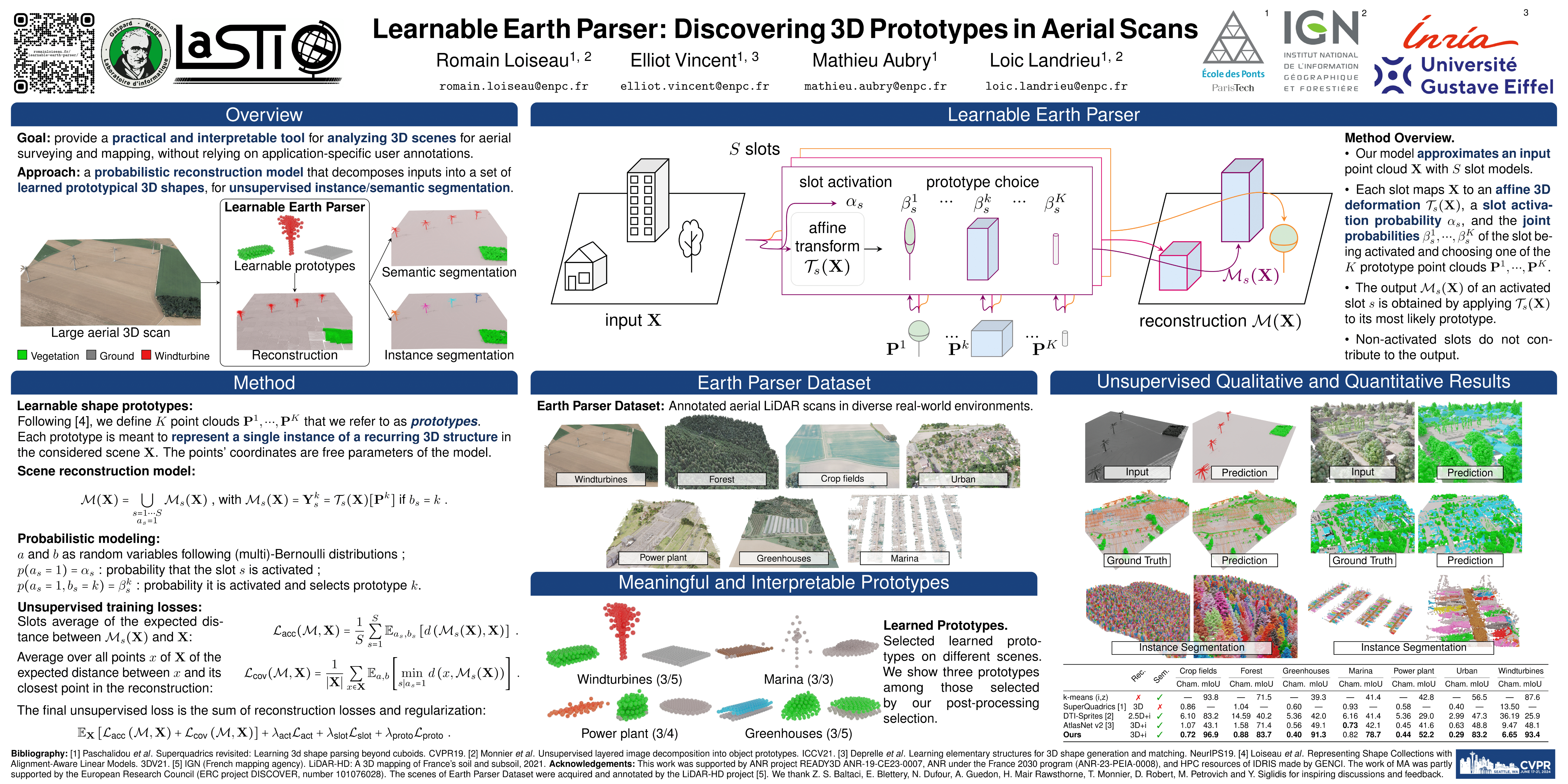
Learnable Earth Parser: Discovering 3D Prototypes in Aerial Scans
Romain Loiseau · Elliot Vincent · Mathieu Aubry · Loic Landrieu
Arch 4A-E Poster #358
{kind=link}
We propose an unsupervised method for parsing large 3D scans of real-world scenes with easily-interpretable shapes. This work aims to provide a practical tool for analyzing 3D scenes in the context of aerial surveying and mapping, without the need for user annotations. Our approach is based on a probabilistic reconstruction model that decomposes an input 3D point cloud into a small set of learned prototypical 3D shapes. The resulting reconstruction is visually interpretable and can be used to perform unsupervised instance and low-shot semantic segmentation of complex scenes. We demonstrate the usefulness of our model on a novel dataset of seven large aerial LiDAR scans from diverse real-world scenarios. Our approach outperforms state-of-the-art unsupervised methods in terms of decomposition accuracy while remaining visually interpretable. Our code and dataset are available at https://romainloiseau.fr/learnable-earth-parser/.