{kind=link}
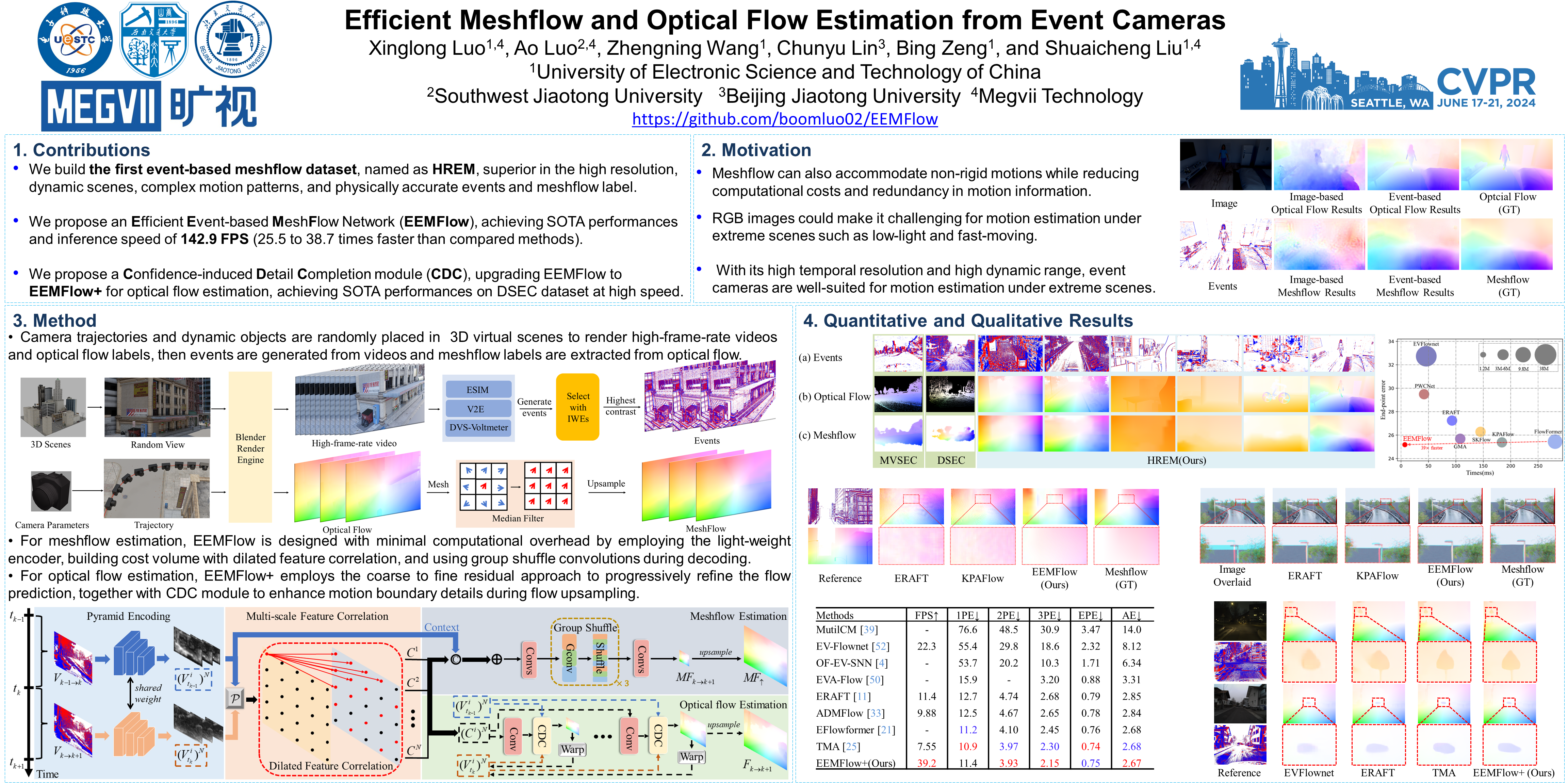
In this paper, we explore the problem of event-based meshflow estimation, a novel task that involves predicting a spatially smooth sparse motion field from event cameras. To start, we generate a large-scale High-Resolution Event Meshflow (HREM) dataset, which showcases its superiority by encompassing the merits of high resolution at 1280x720, handling dynamic objects and complex motion patterns, and offering both optical flow and meshflow labels. These aspects have not been fully explored in previous works. Besides, we propose Efficient Event-based MeshFlow (EEMFlow) network, a lightweight model featuring a specially crafted encoder-decoder architecture to facilitate swift and accurate meshflow estimation. Furthermore, we upgrade EEMFlow network to support dense event optical flow, in which a Confidence-induced Detail Completion (CDC) module is proposed to preserve sharp motion boundaries. We conduct comprehensive experiments to show the exceptional performance and runtime efficiency (39x faster) of our EEMFlow model compared to recent state-of-the-art flow methods. Code and dataset will be released.