Poster
X-3D: Explicit 3D Structure Modeling for Point Cloud Recognition
Shuofeng Sun · Yongming Rao · Jiwen Lu · Haibin Yan
Arch 4A-E Poster #23
{kind=link}
Abstract:
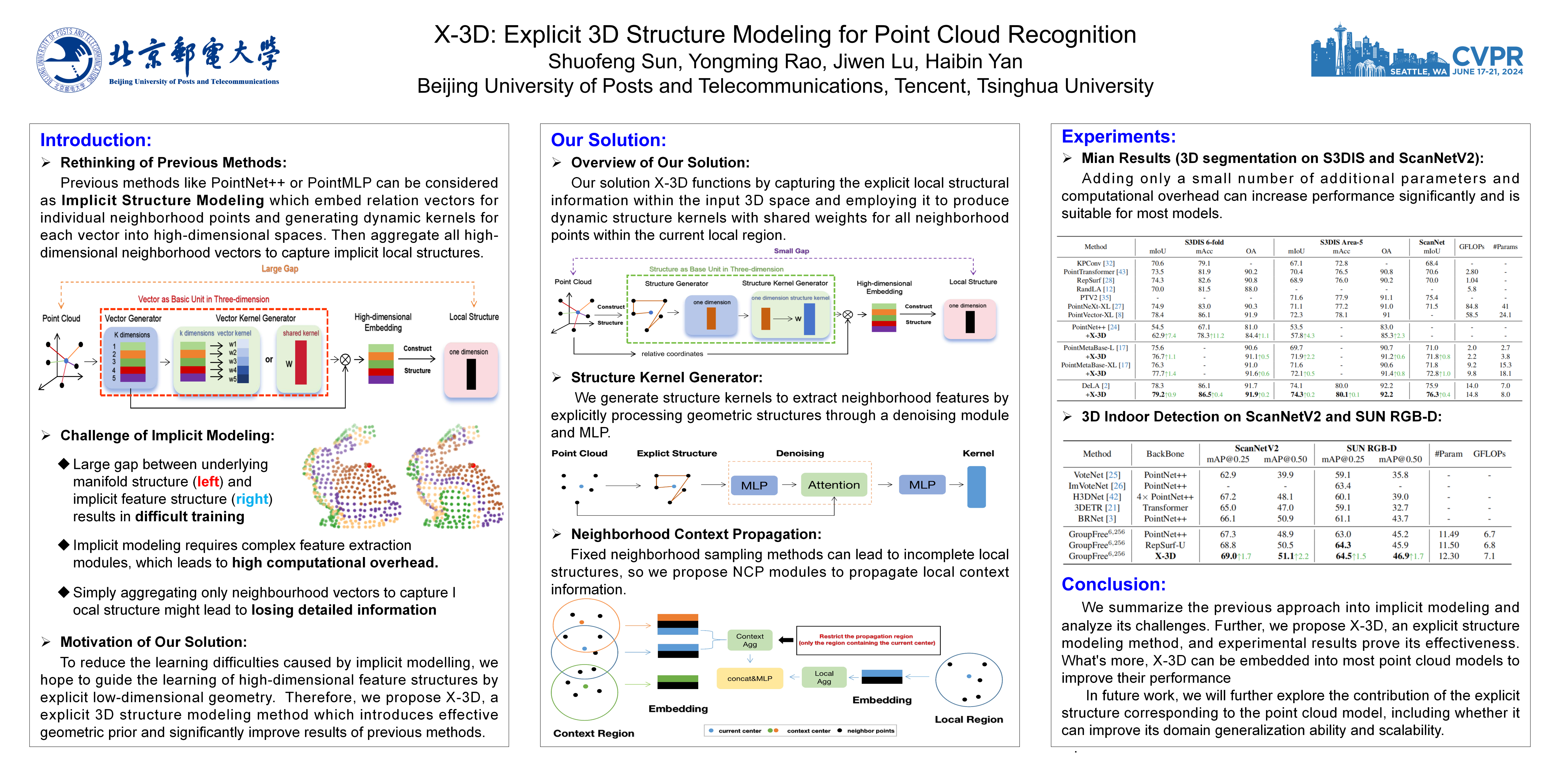
Numerous prior studies predominantly emphasize constructing relation vectors for individual neighborhood points and generating dynamic kernels for each vector and embedding these into high-dimensional spaces to capture implicit local structures. However, we contend that such implicit high-dimensional structure modeling approch inadequately represents the local geometric structure of point clouds due to the absence of explicit structural information. Hence, we introduce X-3D, an explicit 3D structure modeling approach. X-3D functions by capturing the explicit local structural information within the input 3D space and employing it to produce dynamic kernels with shared weights for all neighborhood points within the current local region. This modeling approach introduces effective geometric prior and significantly diminishes the disparity between the local structure of the embedding space and the original input point cloud, thereby improving the extraction of local features. Experiments show that our method can be used on a variety of methods and achieves state-of-the-art performance on segmentation, classification, detection tasks with lower extra computational cost, such as \textbf{90.7\%} on ScanObjectNN for classification, \textbf{79.2\%} on S3DIS 6 fold and \textbf{74.3\%} on S3DIS Area 5 for segmentation, \textbf{76.3\%} on ScanNetV2 for segmentation and \textbf{64.5\%} mAP$_{25}$, \textbf{46.9\%} mAP$_{50}$ on SUN RGB-D and \textbf{69.0\%} mAP$_{25}$, \textbf{51.1\%} mAP$_{50}$ on ScanNetV2 . Our code is available at \href{https://github.com/sunshuofeng/X-3D}{https://github.com/sunshuofeng/X-3D}.
Chat is not available.