Poster
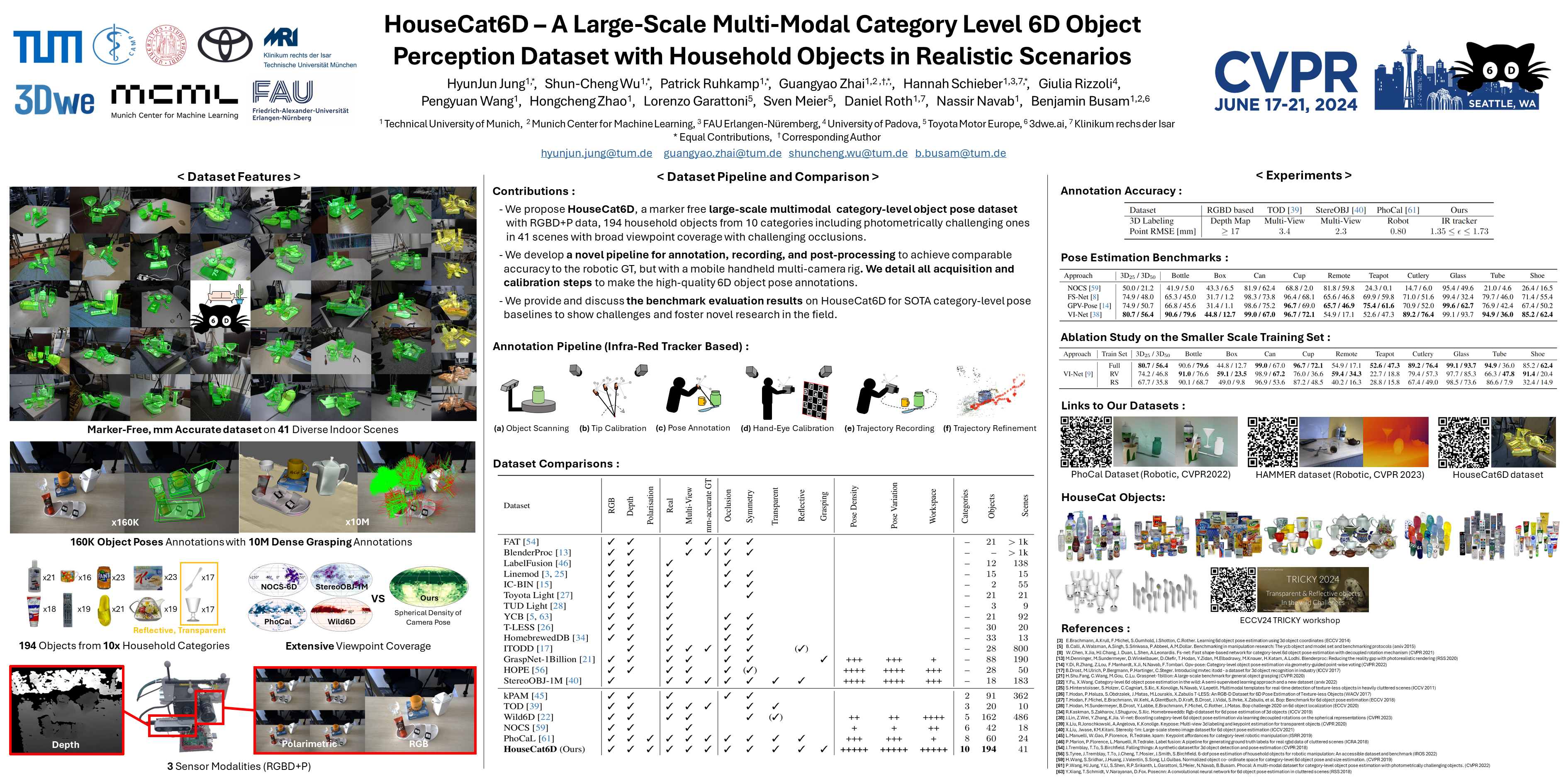
HouseCat6D - A Large-Scale Multi-Modal Category Level 6D Object Perception Dataset with Household Objects in Realistic Scenarios
HyunJun Jung · Shun-Cheng Wu · Patrick Ruhkamp · Guangyao Zhai · Hannah Schieber · Giulia Rizzoli · Pengyuan Wang · Hongcheng Zhao · Lorenzo Garattoni · Sven Meier · Daniel Roth · Nassir Navab · Benjamin Busam
Arch 4A-E Poster #283

{kind=link}
Estimating 6D object poses is a major challenge in 3D computer vision. Building on successful instance-level approaches, research is shifting towards category-level pose estimation for practical applications. Current category-level datasets, however, fall short in annotation quality and pose variety. Addressing this, we introduce HouseCat6D, a new category-level 6D pose dataset. It features 1) multi-modality with Polarimetric RGB and Depth (RGBD+P), 2) encompasses 194 diverse objects across 10 household categories, including two photometrically challenging ones, and 3) provides high-quality pose annotations with an error range of only 1.35 mm to 1.74 mm. The dataset also includes 4) 41 large-scale scenes with comprehensive viewpoint and occlusion coverage, 5) a checkerboard-free environment, and 6) dense 6D parallel-jaw robotic grasp annotations. Additionally, we present benchmark results for leading category-level pose estimation networks.