{kind=link}
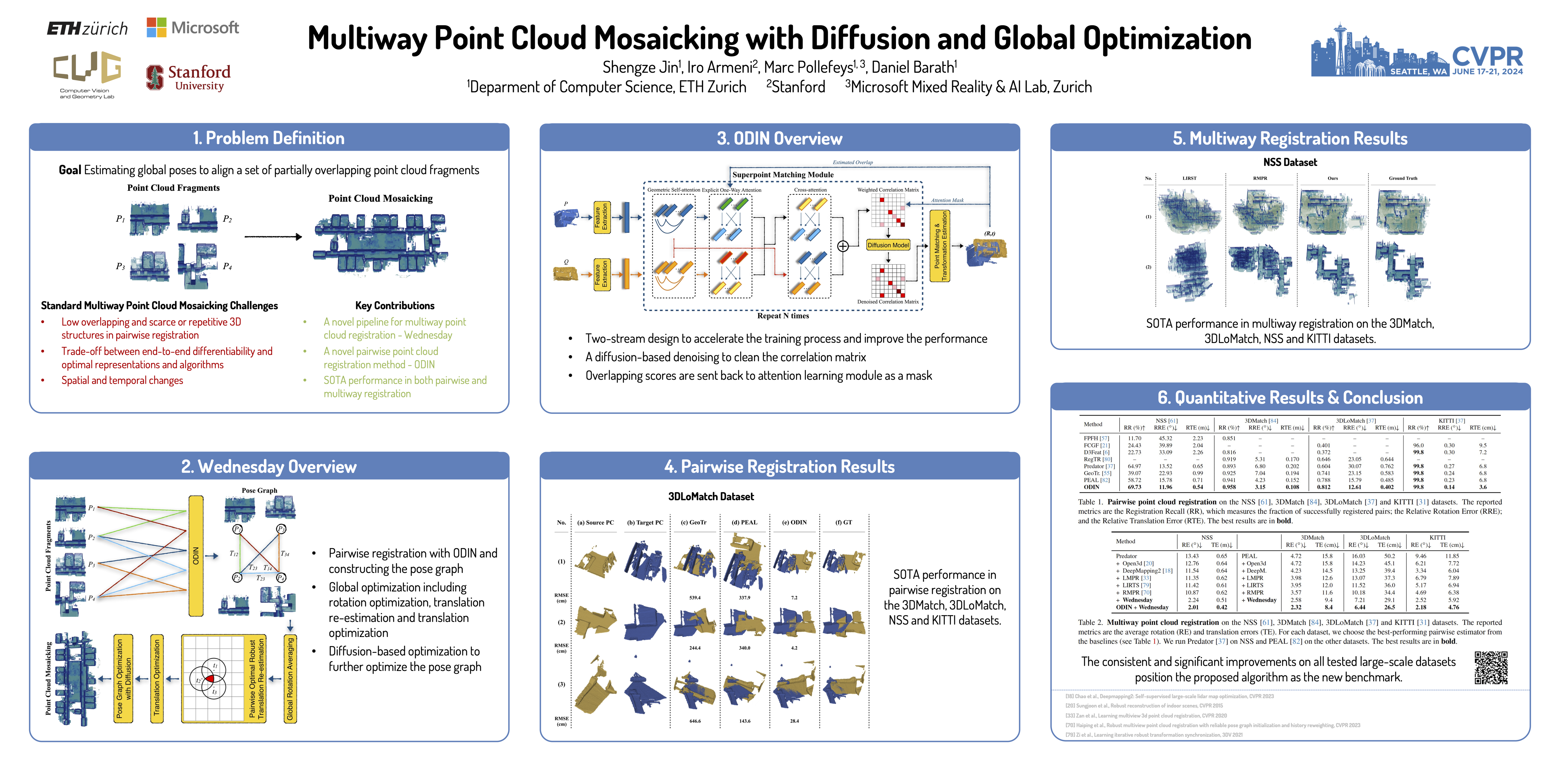
We introduce a novel framework for multiway point cloud mosaicking (named Wednesday), designed to co-align sets of partially overlapping point clouds -- typically obtained from 3D scanners or moving RGB-D cameras -- into a unified coordinate system. At the core of our approach is ODIN, a learned pairwise registration algorithm that iteratively identifies overlaps and refines attention scores, employing a diffusion-based process for denoising pairwise correlation matrices to enhance matching accuracy. Further steps include constructing a pose graph from all point clouds, performing rotation averaging, a novel robust algorithm for re-estimating translations optimally in terms of consensus maximization and translation optimization. Finally, the point cloud rotations and positions are optimized jointly by a diffusion-based approach. Tested on four diverse, large-scale datasets, our method achieves state-of-the-art pairwise and multiway registration results by a large margin on all benchmarks. Our code and models are available at https://github.com/jinsz/Multiway-Point-Cloud-Mosaicking-with-Diffusion-and-Global-Optimization.