{kind=link}
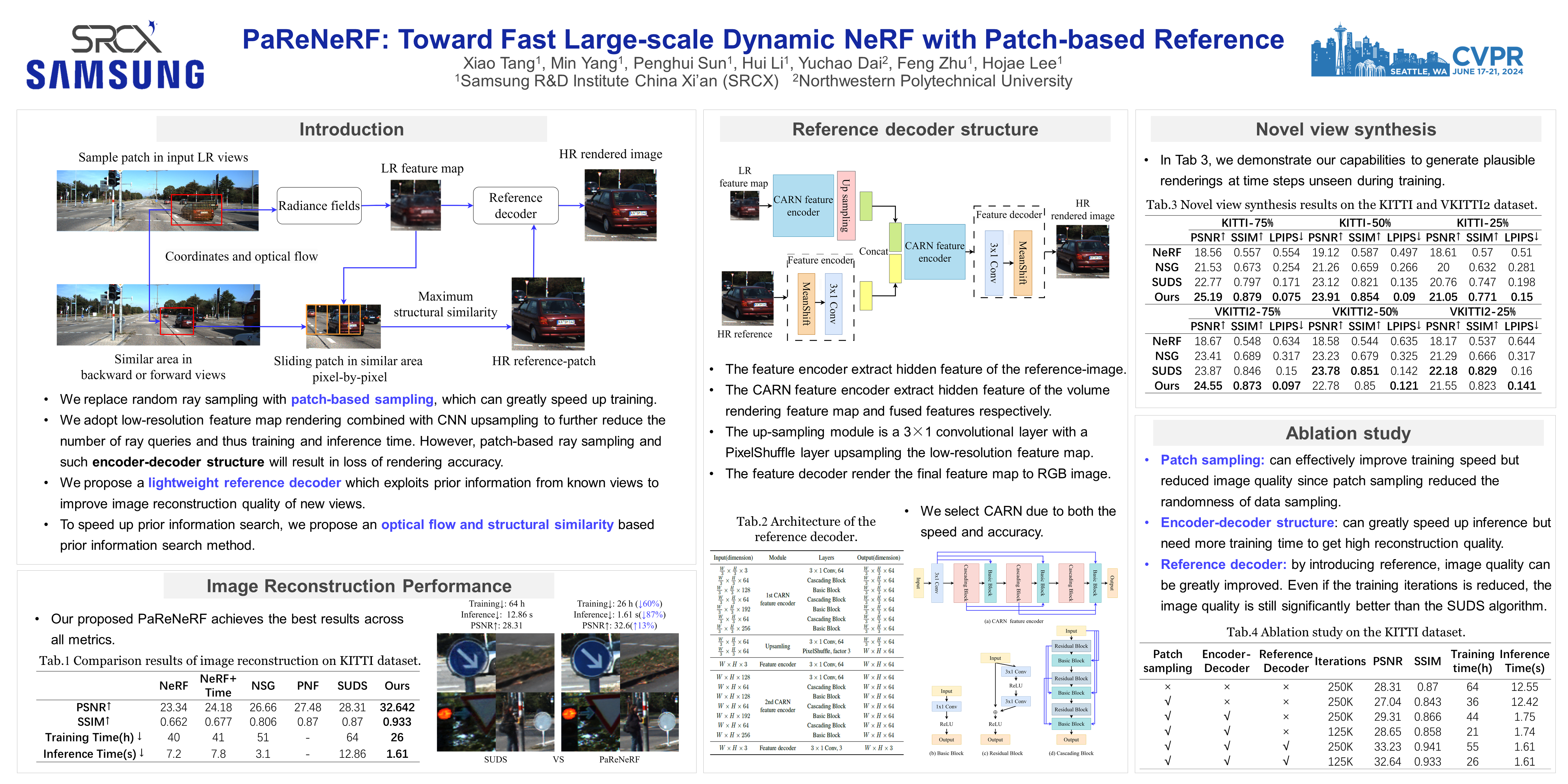
With photo-realistic image generation, Neural Radiance Field (NeRF) is widely used for large-scale dynamic scene reconstruction as autonomous driving simulator. However, large-scale scene reconstruction still suffers from extremely long training time and rendering time. Low-resolution(LR) rendering combined with upsampling can alleviate this problem but it degrades image quality. In this paper, we design a lightweight reference decoder which exploits prior information from known views to improve image reconstruction quality of new views. In addition, to speed up prior information search, we propose an optical flow and structural similarity based prior information search method. Results on KITTI and VKITTI2 datasets show that our method significantly outperforms the baseline method in terms of training speed, rendering speed and rendering quality.