{kind=link}
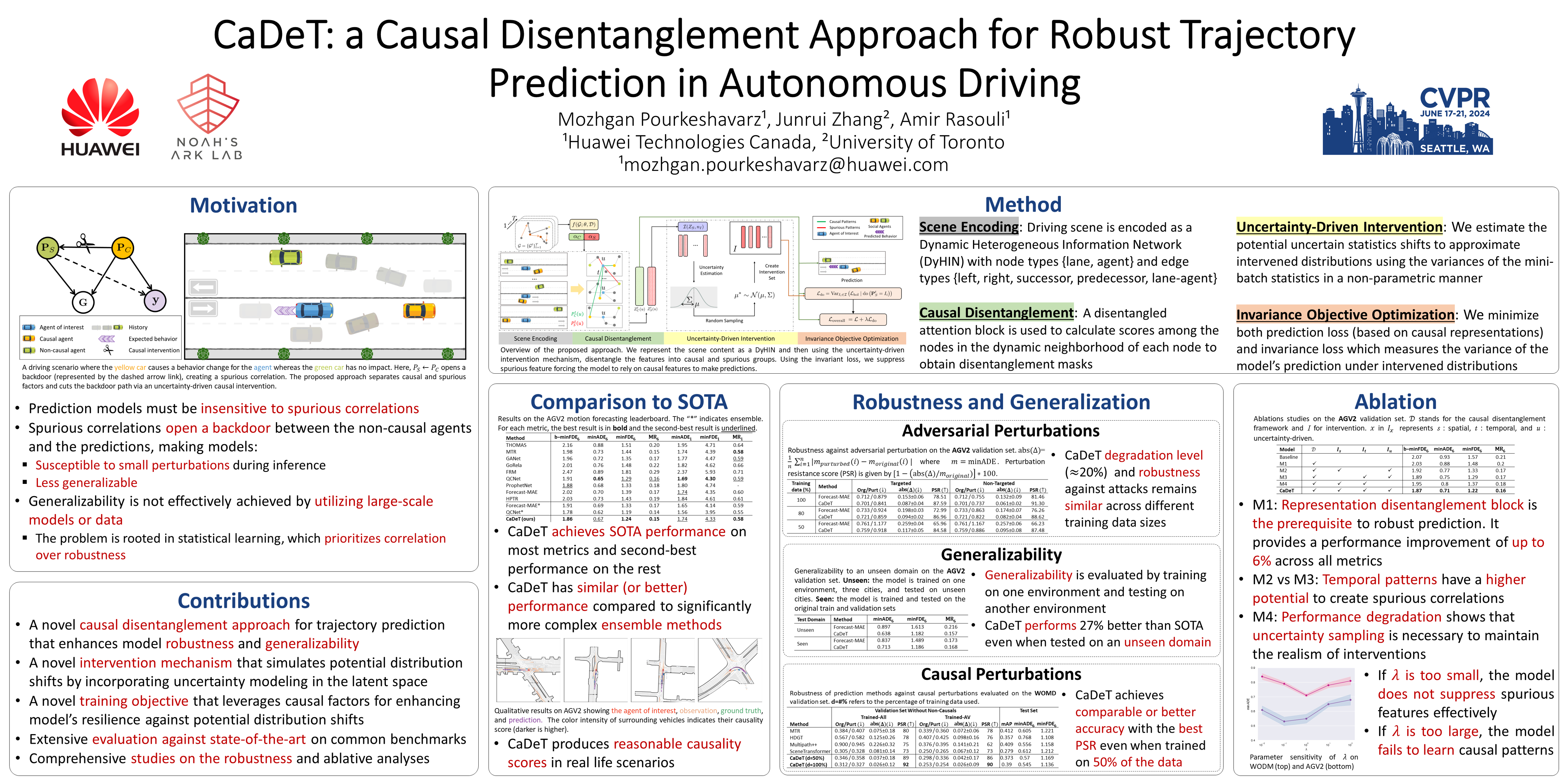
For safe motion planning in real-world, autonomous vehicles require behavior prediction models that are reliable and robust to distribution shifts. The recent studies suggest that the existing learning-based trajectory prediction models do not posses such characteristics and are susceptible to small perturbations that are not present in the training data, largely due to overfitting to spurious correlations while learning. In this paper, we propose a causal disentanglement representation learning approach aiming to separate invariant (causal) and variant (spurious) features for more robust learning. Our method benefits from a novel intervention mechanism in the latent space that estimates potential distribution shifts resulted from spurious correlations using uncertain feature statistics, hence, maintaining the realism of interventions. To facilitate learning, we propose a novel invariance objective based on the variances of the distributions over uncertain statistics to induce the model to focus on invariant representations during training.We conduct extensive experiments on two large-scale autonomous driving datasets and show that besides achieving state-of-the-art performance, our method can significantly improve prediction robustness to various distribution shifts in driving scenes. We further conduct ablative studies to evaluate the design choices in our proposed framework.