{kind=link}
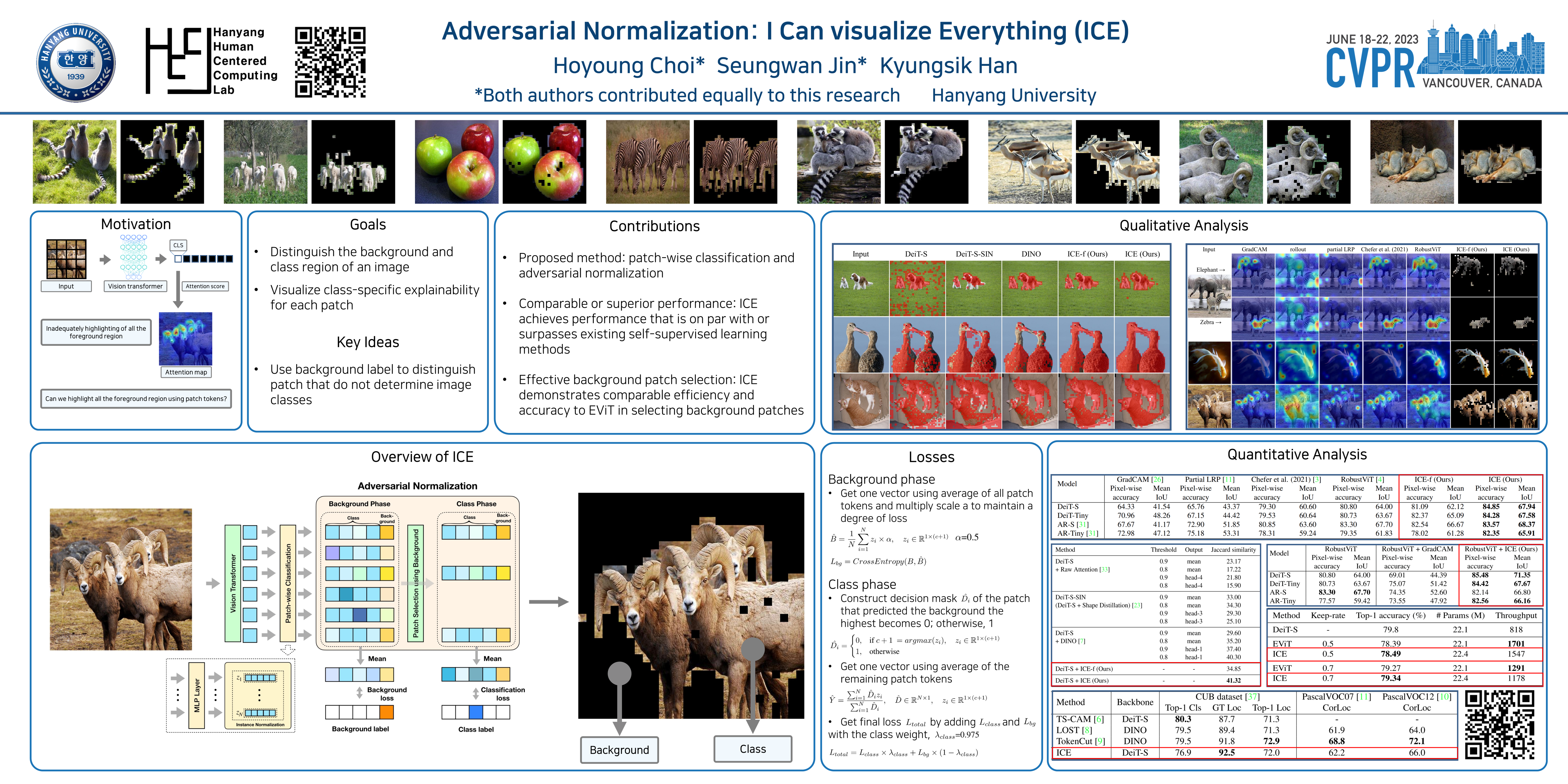
Vision transformers use [CLS] tokens to predict image classes. Their explainability visualization has been studied using relevant information from [CLS] tokens or focusing on attention scores during self-attention. Such visualization, however, is challenging because of the dependence of the structure of a vision transformer on skip connections and attention operators, the instability of non-linearities in the learning process, and the limited reflection of self-attention scores on relevance. We argue that the output vectors for each input patch token in a vision transformer retain the image information of each patch location, which can facilitate the prediction of an image class. In this paper, we propose ICE (Adversarial Normalization: I Can visualize Everything), a novel method that enables a model to directly predict a class for each patch in an image; thus, advancing the effective visualization of the explainability of a vision transformer. Our method distinguishes background from foreground regions by predicting background classes for patches that do not determine image classes. We used the DeiT-S model, the most representative model employed in studies, on the explainability visualization of vision transformers. On the ImageNet-Segmentation dataset, ICE outperformed all explainability visualization methods for four cases depending on the model size. We also conducted quantitative and qualitative analyses on the tasks of weakly-supervised object localization and unsupervised object discovery. On the CUB-200-2011 and PASCALVOC07/12 datasets, ICE achieved comparable performance to the state-of-the-art methods. We incorporated ICE into the encoder of DeiT-S and improved efficiency by 44.01% on the ImageNet dataset over that achieved by the original DeiT-S model. We showed performance on the accuracy and efficiency comparable to EViT, the state-of-the-art pruning model, demonstrating the effectiveness of ICE. The code is available at https://github.com/Hanyang-HCC-Lab/ICE.