{kind=link}
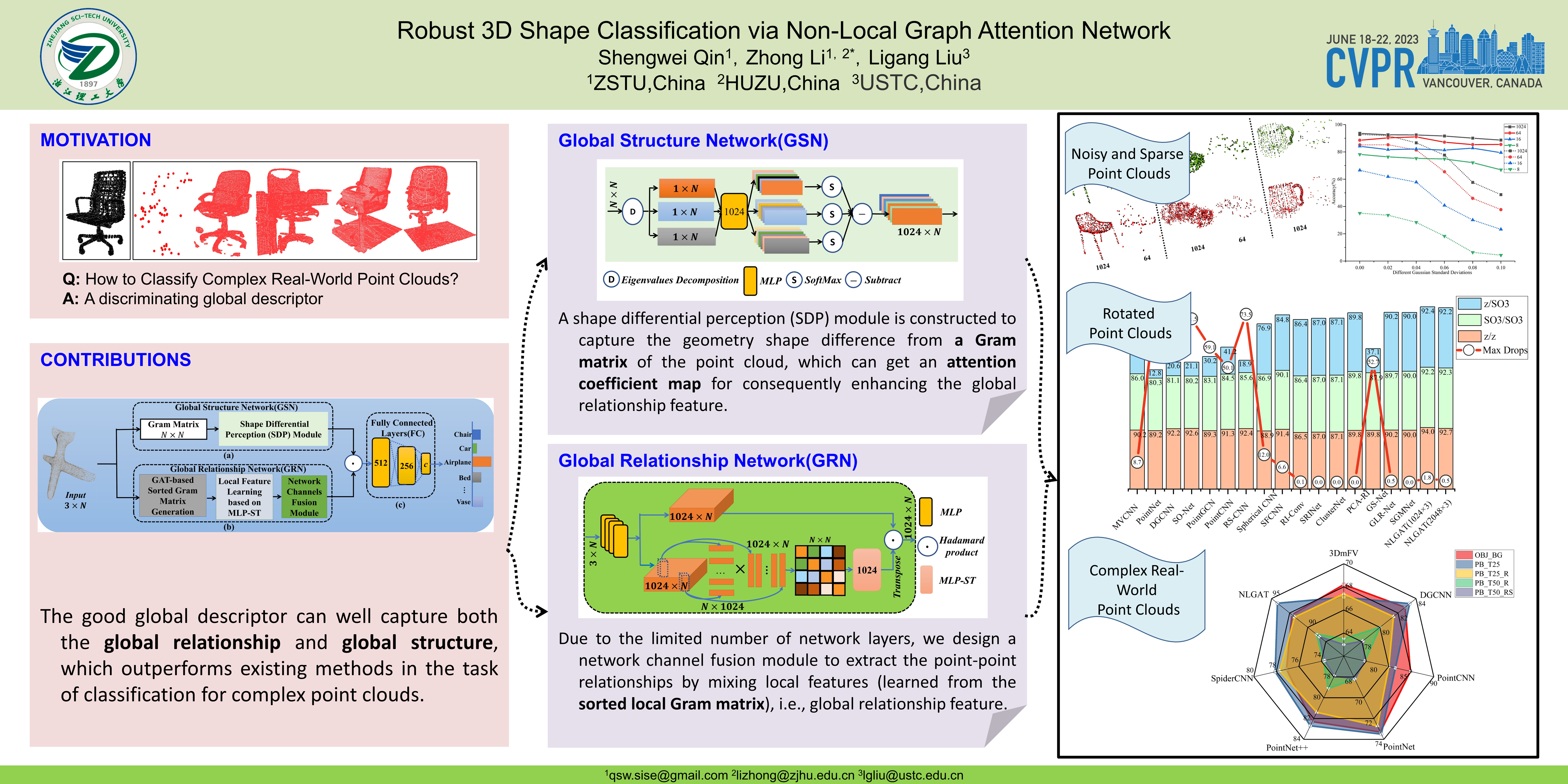
We introduce a non-local graph attention network (NLGAT), which generates a novel global descriptor through two sub-networks for robust 3D shape classification. In the first sub-network, we capture the global relationships between points (i.e., point-point features) by designing a global relationship network (GRN). In the second sub-network, we enhance the local features with a geometric shape attention map obtained from a global structure network (GSN). To keep rotation invariant and extract more information from sparse point clouds, all sub-networks use the Gram matrices with different dimensions as input for working with robust classification. Additionally, GRN effectively preserves the low-frequency features and improves the classification results. Experimental results on various datasets exhibit that the classification effect of the NLGAT model is better than other state-of-the-art models. Especially, in the case of sparse point clouds (64 points) with noise under arbitrary SO(3) rotation, the classification result (85.4%) of NLGAT is improved by 39.4% compared with the best development of other methods.