Poster
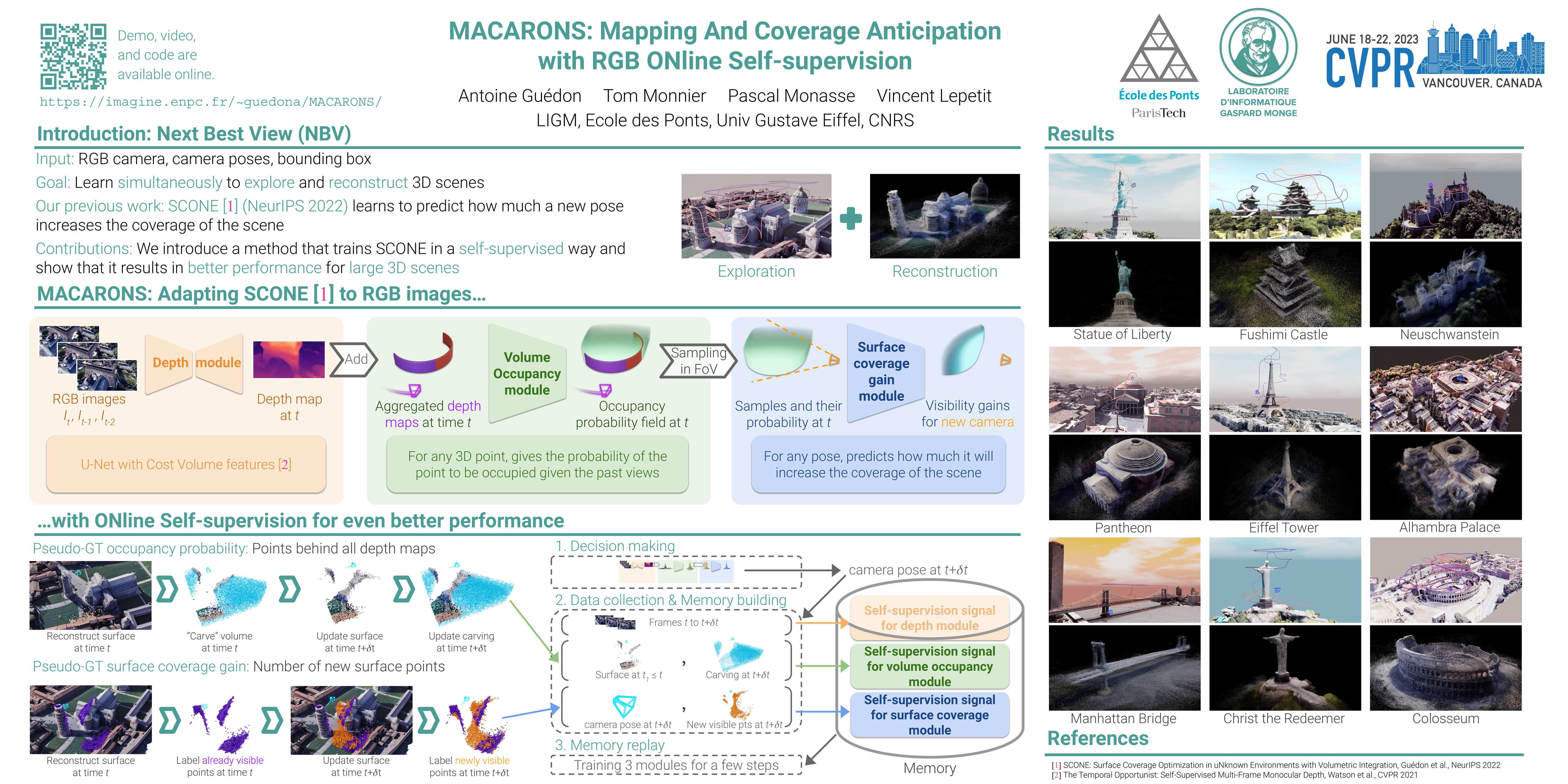
MACARONS: Mapping and Coverage Anticipation With RGB Online Self-Supervision
Antoine Guédon · Tom Monnier · Pascal Monasse · Vincent Lepetit
West Building Exhibit Halls ABC 089
{kind=link}
We introduce a method that simultaneously learns to explore new large environments and to reconstruct them in 3D from color images only. This is closely related to the Next Best View problem (NBV), where one has to identify where to move the camera next to improve the coverage of an unknown scene. However, most of the current NBV methods rely on depth sensors, need 3D supervision and/or do not scale to large scenes. Our method requires only a color camera and no 3D supervision. It simultaneously learns in a self-supervised fashion to predict a volume occupancy field from color images and, from this field, to predict the NBV. Thanks to this approach, our method performs well on new scenes as it is not biased towards any training 3D data. We demonstrate this on a recent dataset made of various 3D scenes and show it performs even better than recent methods requiring a depth sensor, which is not a realistic assumption for outdoor scenes captured with a flying drone.