{kind=link}
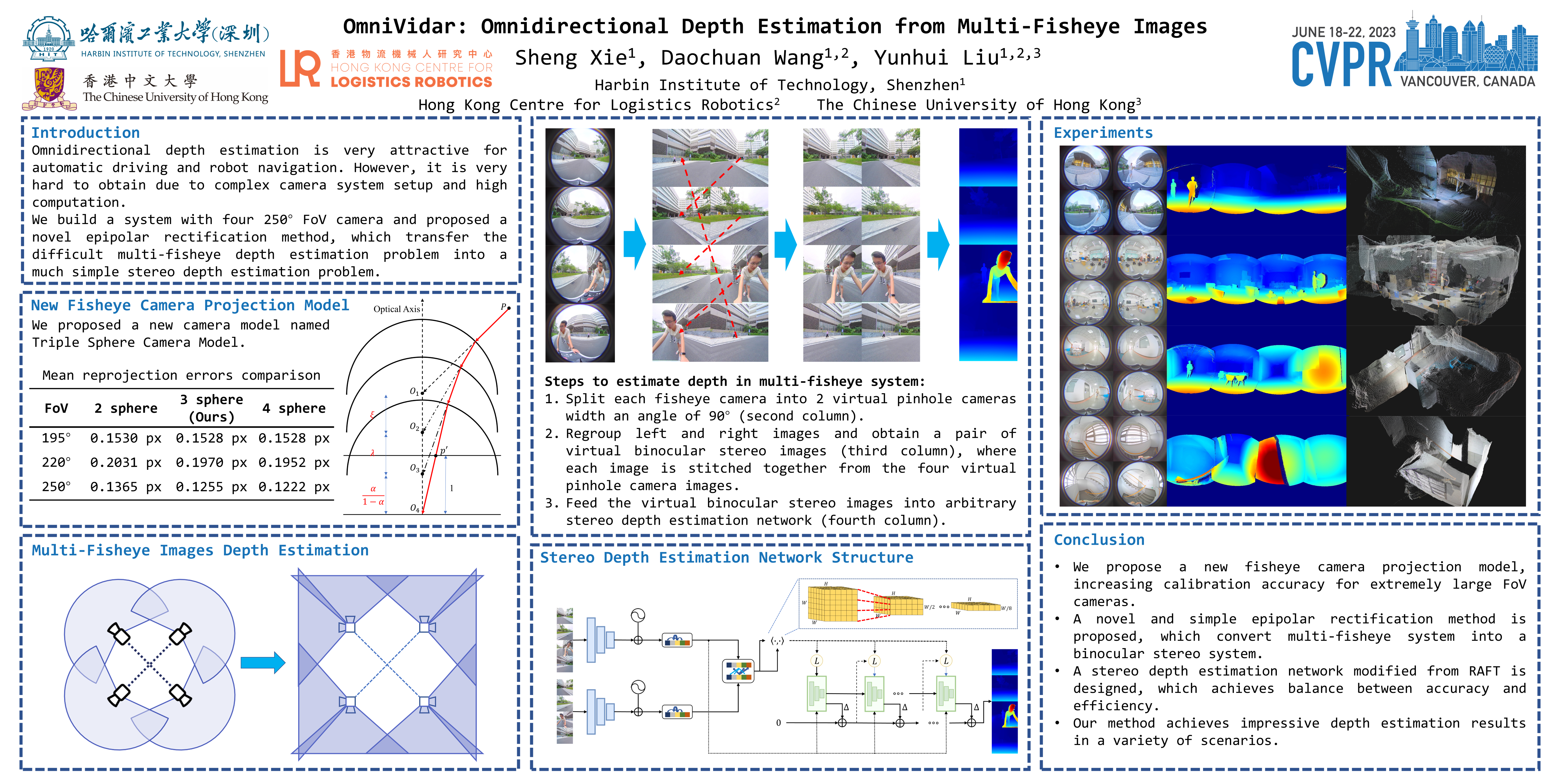
Estimating depth from four large field of view (FoV) cameras has been a difficult and understudied problem. In this paper, we proposed a novel and simple system that can convert this difficult problem into easier binocular depth estimation. We name this system OmniVidar, as its results are similar to LiDAR, but rely only on vision. OmniVidar contains three components: (1) a new camera model to address the shortcomings of existing models, (2) a new multi-fisheye camera based epipolar rectification method for solving the image distortion and simplifying the depth estimation problem, (3) an improved binocular depth estimation network, which achieves a better balance between accuracy and efficiency. Unlike other omnidirectional stereo vision methods, OmniVidar does not contain any 3D convolution, so it can achieve higher resolution depth estimation at fast speed. Results demonstrate that OmniVidar outperforms all other methods in terms of accuracy and performance.