{kind=link}
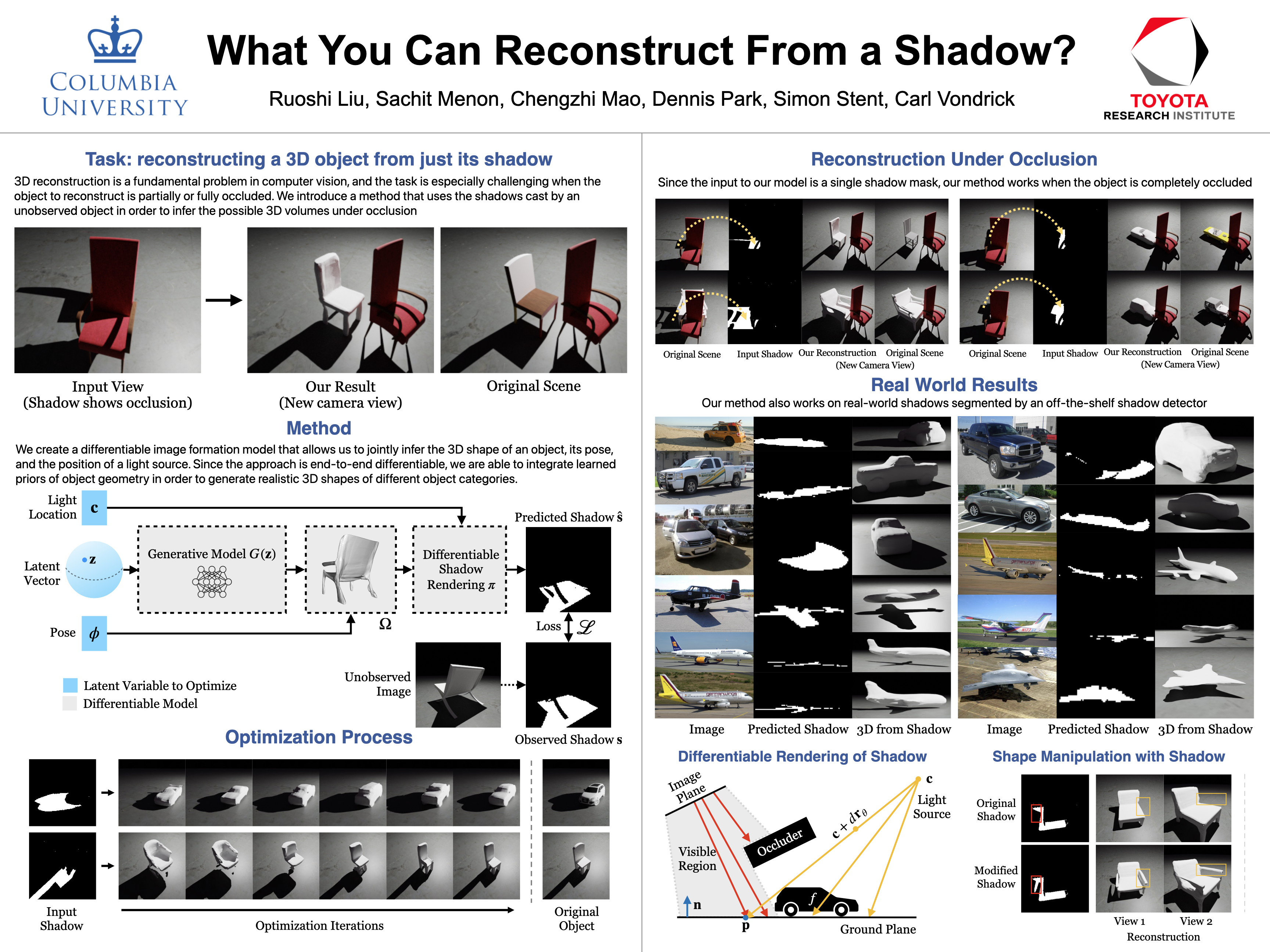
3D reconstruction is a fundamental problem in computer vision, and the task is especially challenging when the object to reconstruct is partially or fully occluded. We introduce a method that uses the shadows cast by an unobserved object in order to infer the possible 3D volumes under occlusion. We create a differentiable image formation model that allows us to jointly infer the 3D shape of an object, its pose, and the position of a light source. Since the approach is end-to-end differentiable, we are able to integrate learned priors of object geometry in order to generate realistic 3D shapes of different object categories. Experiments and visualizations show that the method is able to generate multiple possible solutions that are consistent with the observation of the shadow. Our approach works even when the position of the light source and object pose are both unknown. Our approach is also robust to real-world images where ground-truth shadow mask is unknown.