Poster
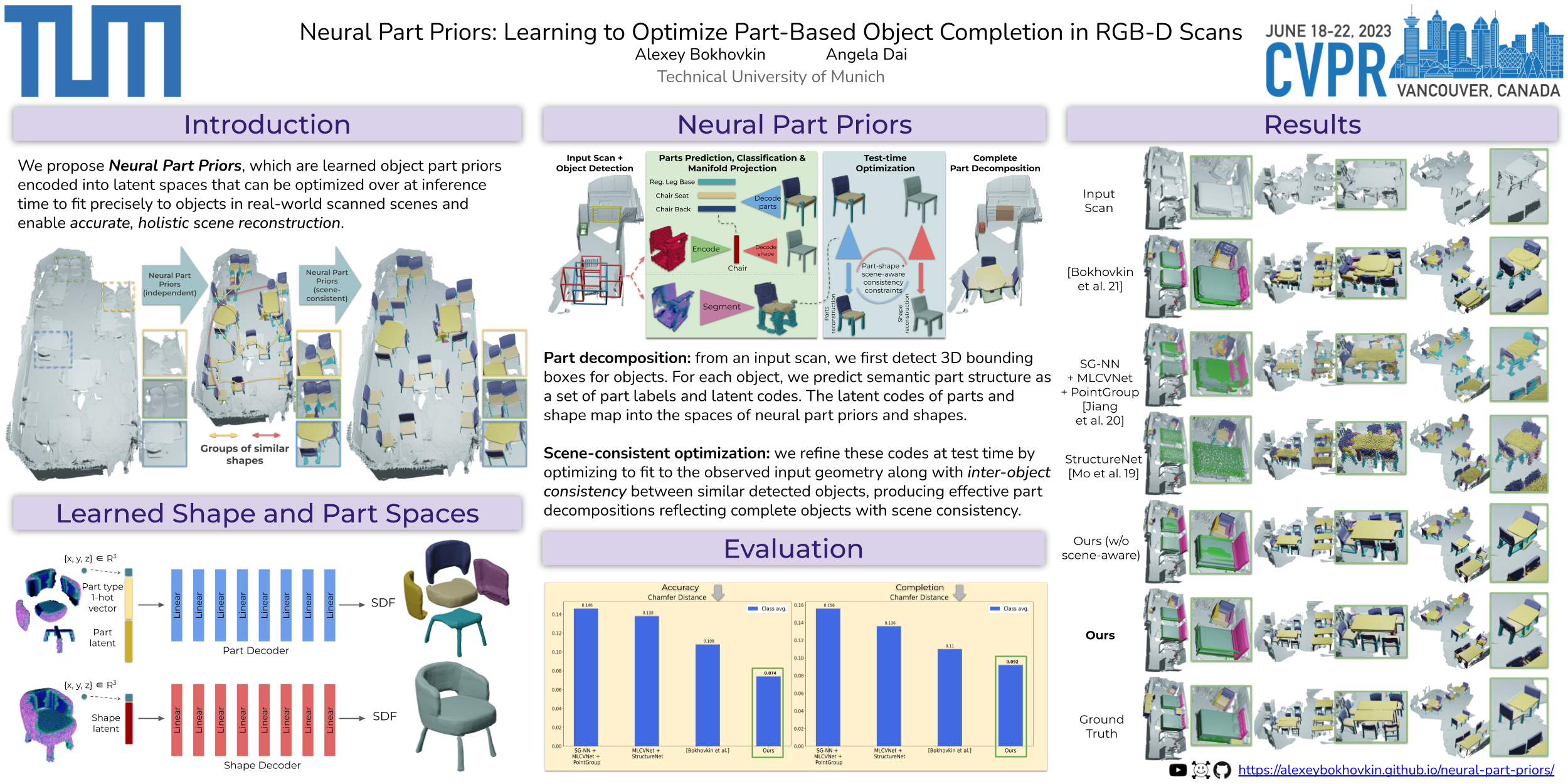
Neural Part Priors: Learning To Optimize Part-Based Object Completion in RGB-D Scans
Aleksei Bokhovkin · Angela Dai
West Building Exhibit Halls ABC 077

{kind=link}
3D scene understanding has seen significant advances in recent years, but has largely focused on object understanding in 3D scenes with independent per-object predictions. We thus propose to learn Neural Part Priors (NPPs), parametric spaces of objects and their parts, that enable optimizing to fit to a new input 3D scan geometry with global scene consistency constraints. The rich structure of our NPPs enables accurate, holistic scene reconstruction across similar objects in the scene. Both objects and their part geometries are characterized by coordinate field MLPs, facilitating optimization at test time to fit to input geometric observations as well as similar objects in the input scan. This enables more accurate reconstructions than independent per-object predictions as a single forward pass, while establishing global consistency within a scene. Experiments on the ScanNet dataset demonstrate that NPPs significantly outperforms the state-of-the-art in part decomposition and object completion in real-world scenes.