Poster
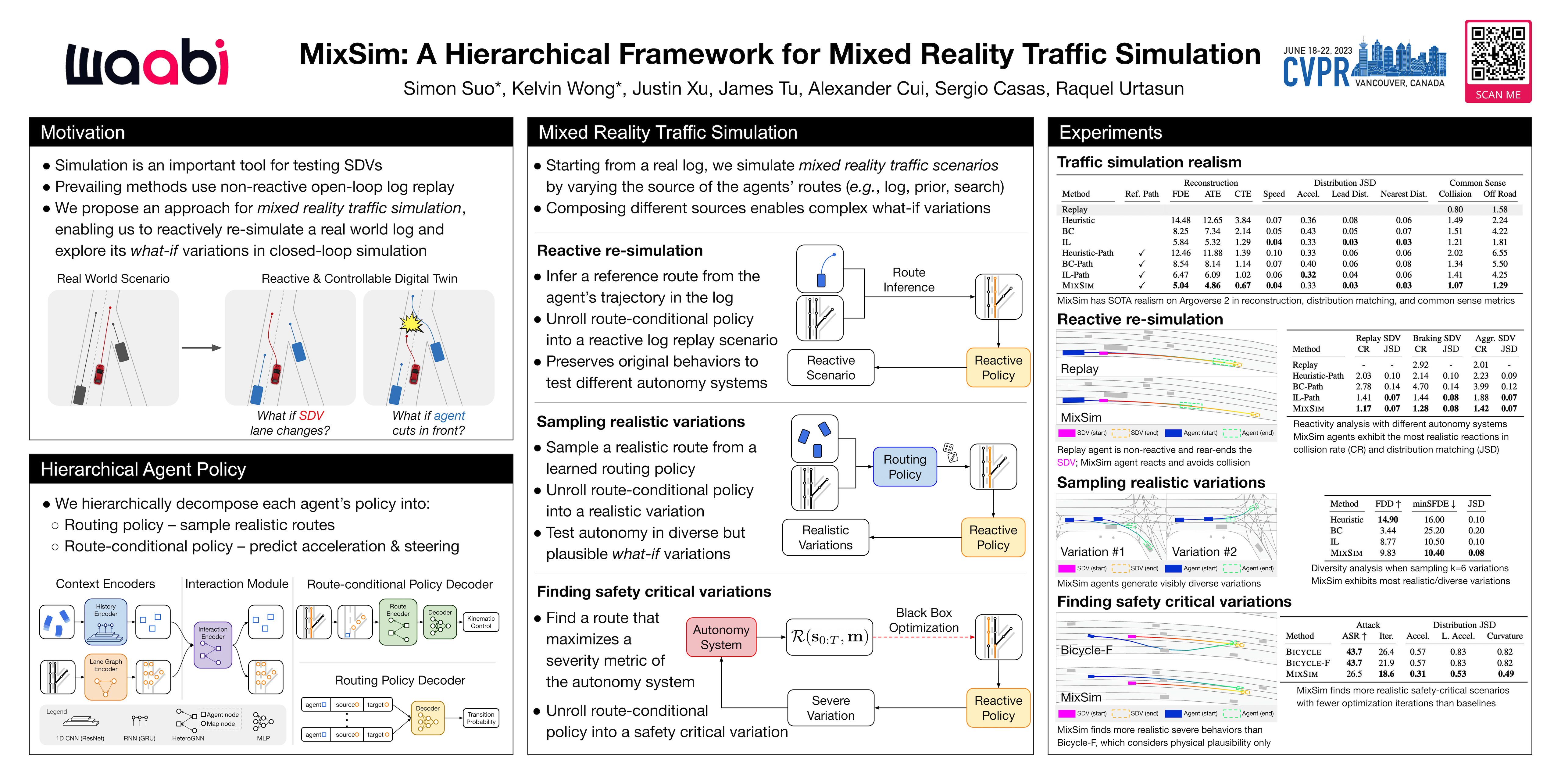
MixSim: A Hierarchical Framework for Mixed Reality Traffic Simulation
Simon Suo · Kelvin Wong · Justin Xu · James Tu · Alexander Cui · Sergio Casas · Raquel Urtasun
West Building Exhibit Halls ABC 133
{kind=link}
The prevailing way to test a self-driving vehicle (SDV) in simulation involves non-reactive open-loop replay of real world scenarios. However, in order to safely deploy SDVs to the real world, we need to evaluate them in closed-loop. Towards this goal, we propose to leverage the wealth of interesting scenarios captured in the real world and make them reactive and controllable to enable closed-loop SDV evaluation in what-if situations. In particular, we present MixSim, a hierarchical framework for mixed reality traffic simulation. MixSim explicitly models agent goals as routes along the road network and learns a reactive route-conditional policy. By inferring each agent’s route from the original scenario, MixSim can reactively re-simulate the scenario and enable testing different autonomy systems under the same conditions. Furthermore, by varying each agent’s route, we can expand the scope of testing to what-if situations with realistic variations in agent behaviors or even safety-critical interactions. Our experiments show that MixSim can serve as a realistic, reactive, and controllable digital twin of real world scenarios. For more information, please visit the project website: https://waabi.ai/research/mixsim/