Poster
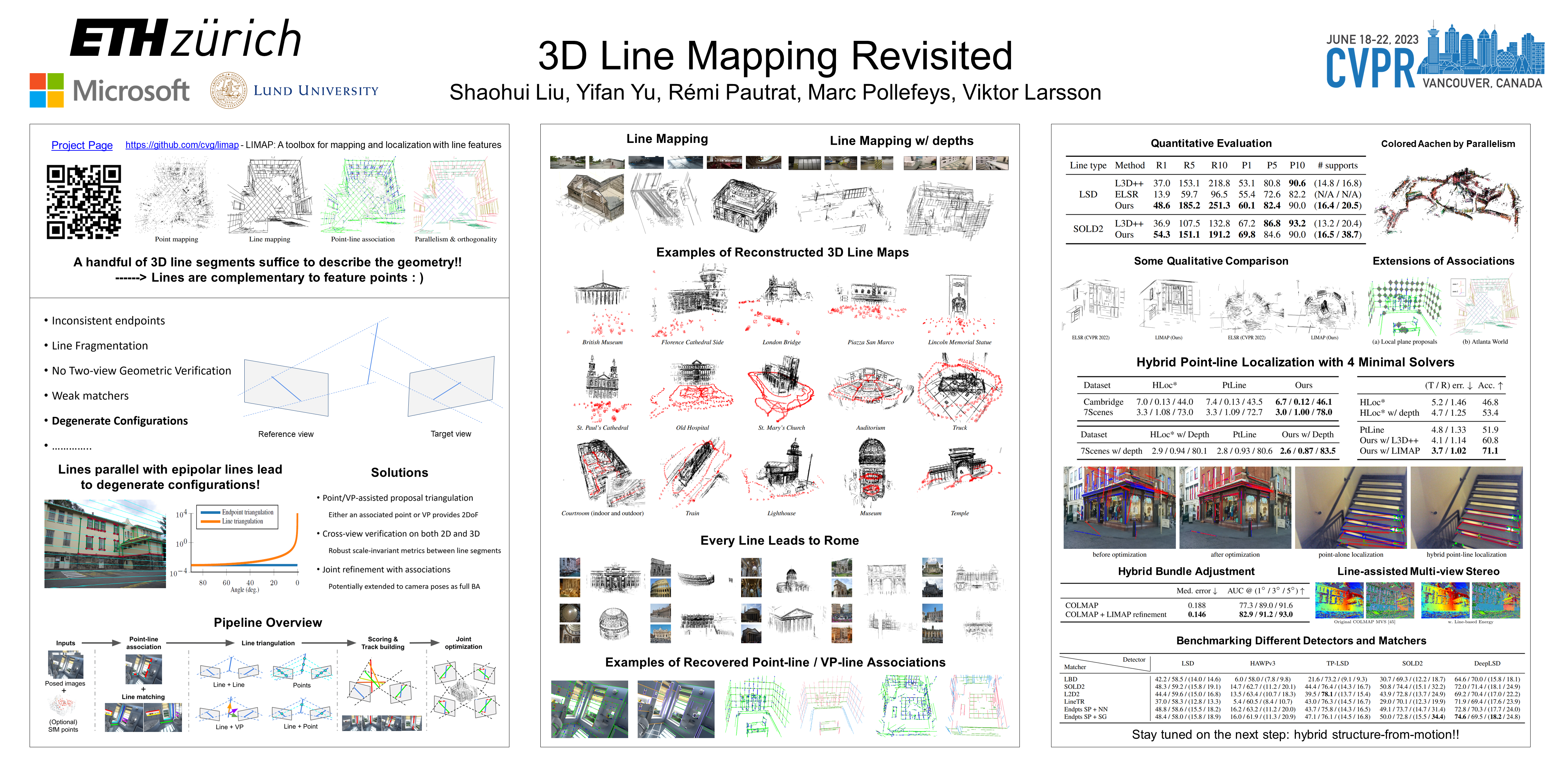
3D Line Mapping Revisited
Shaohui Liu · Yifan Yu · Rémi Pautrat · Marc Pollefeys · Viktor Larsson
West Building Exhibit Halls ABC 080

{kind=link}
In contrast to sparse keypoints, a handful of line segments can concisely encode the high-level scene layout, as they often delineate the main structural elements. In addition to offering strong geometric cues, they are also omnipresent in urban landscapes and indoor scenes. Despite their apparent advantages, current line-based reconstruction methods are far behind their point-based counterparts. In this paper we aim to close the gap by introducing LIMAP, a library for 3D line mapping that robustly and efficiently creates 3D line maps from multi-view imagery. This is achieved through revisiting the degeneracy problem of line triangulation, carefully crafted scoring and track building, and exploiting structural priors such as line coincidence, parallelism, and orthogonality. Our code integrates seamlessly with existing point-based Structure-from-Motion methods and can leverage their 3D points to further improve the line reconstruction. Furthermore, as a byproduct, the method is able to recover 3D association graphs between lines and points / vanishing points (VPs). In thorough experiments, we show that LIMAP significantly outperforms existing approaches for 3D line mapping. Our robust 3D line maps also open up new research directions. We show two example applications: visual localization and bundle adjustment, where integrating lines alongside points yields the best results. Code is available at https://github.com/cvg/limap.