Poster
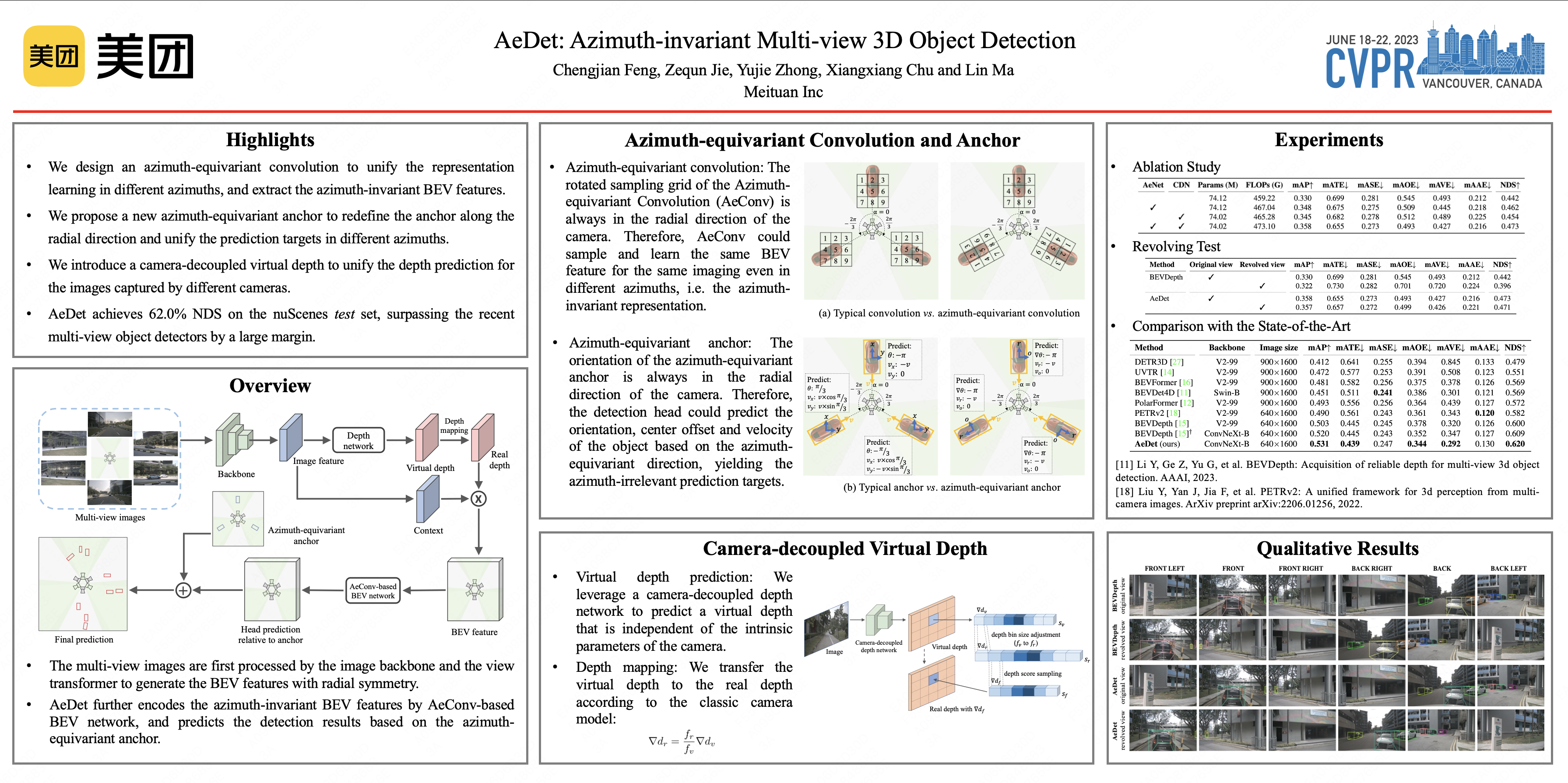
AeDet: Azimuth-Invariant Multi-View 3D Object Detection
Chengjian Feng · Zequn Jie · Yujie Zhong · Xiangxiang Chu · Lin Ma
West Building Exhibit Halls ABC 093
{kind=link}
Recent LSS-based multi-view 3D object detection has made tremendous progress, by processing the features in Brid-Eye-View (BEV) via the convolutional detector. However, the typical convolution ignores the radial symmetry of the BEV features and increases the difficulty of the detector optimization. To preserve the inherent property of the BEV features and ease the optimization, we propose an azimuth-equivariant convolution (AeConv) and an azimuth-equivariant anchor. The sampling grid of AeConv is always in the radial direction, thus it can learn azimuth-invariant BEV features. The proposed anchor enables the detection head to learn predicting azimuth-irrelevant targets. In addition, we introduce a camera-decoupled virtual depth to unify the depth prediction for the images with different camera intrinsic parameters. The resultant detector is dubbed Azimuth-equivariant Detector (AeDet). Extensive experiments are conducted on nuScenes, and AeDet achieves a 62.0% NDS, surpassing the recent multi-view 3D object detectors such as PETRv2 and BEVDepth by a large margin.