{kind=link}
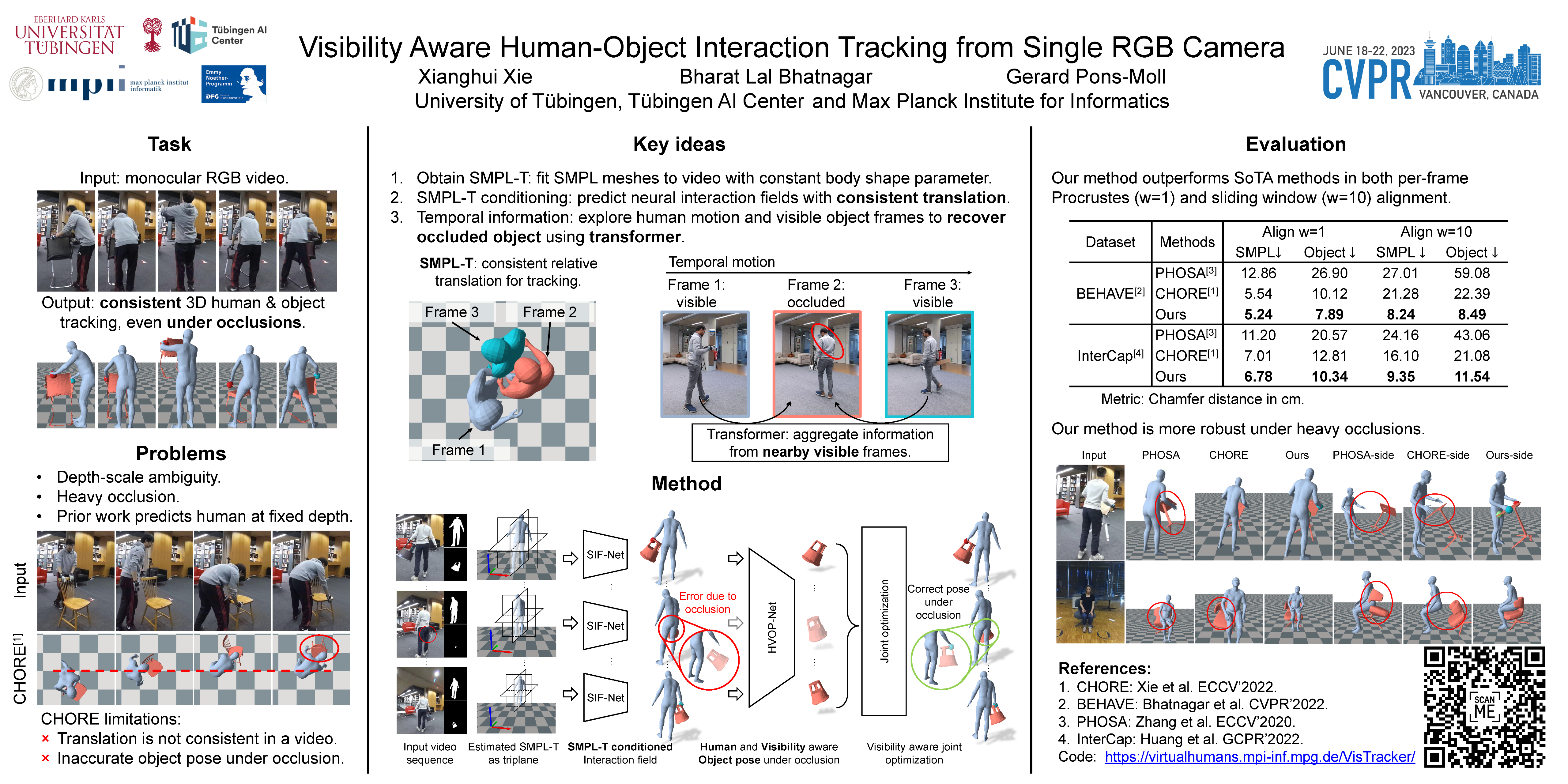
Capturing the interactions between humans and their environment in 3D is important for many applications in robotics, graphics, and vision. Recent works to reconstruct the 3D human and object from a single RGB image do not have consistent relative translation across frames because they assume a fixed depth. Moreover, their performance drops significantly when the object is occluded. In this work, we propose a novel method to track the 3D human, object, contacts, and relative translation across frames from a single RGB camera, while being robust to heavy occlusions. Our method is built on two key insights. First, we condition our neural field reconstructions for human and object on per-frame SMPL model estimates obtained by pre-fitting SMPL to a video sequence. This improves neural reconstruction accuracy and produces coherent relative translation across frames. Second, human and object motion from visible frames provides valuable information to infer the occluded object. We propose a novel transformer-based neural network that explicitly uses object visibility and human motion to leverage neighboring frames to make predictions for the occluded frames. Building on these insights, our method is able to track both human and object robustly even under occlusions. Experiments on two datasets show that our method significantly improves over the state-of-the-art methods. Our code and pretrained models are available at: https://virtualhumans.mpi-inf.mpg.de/VisTracker.