Poster
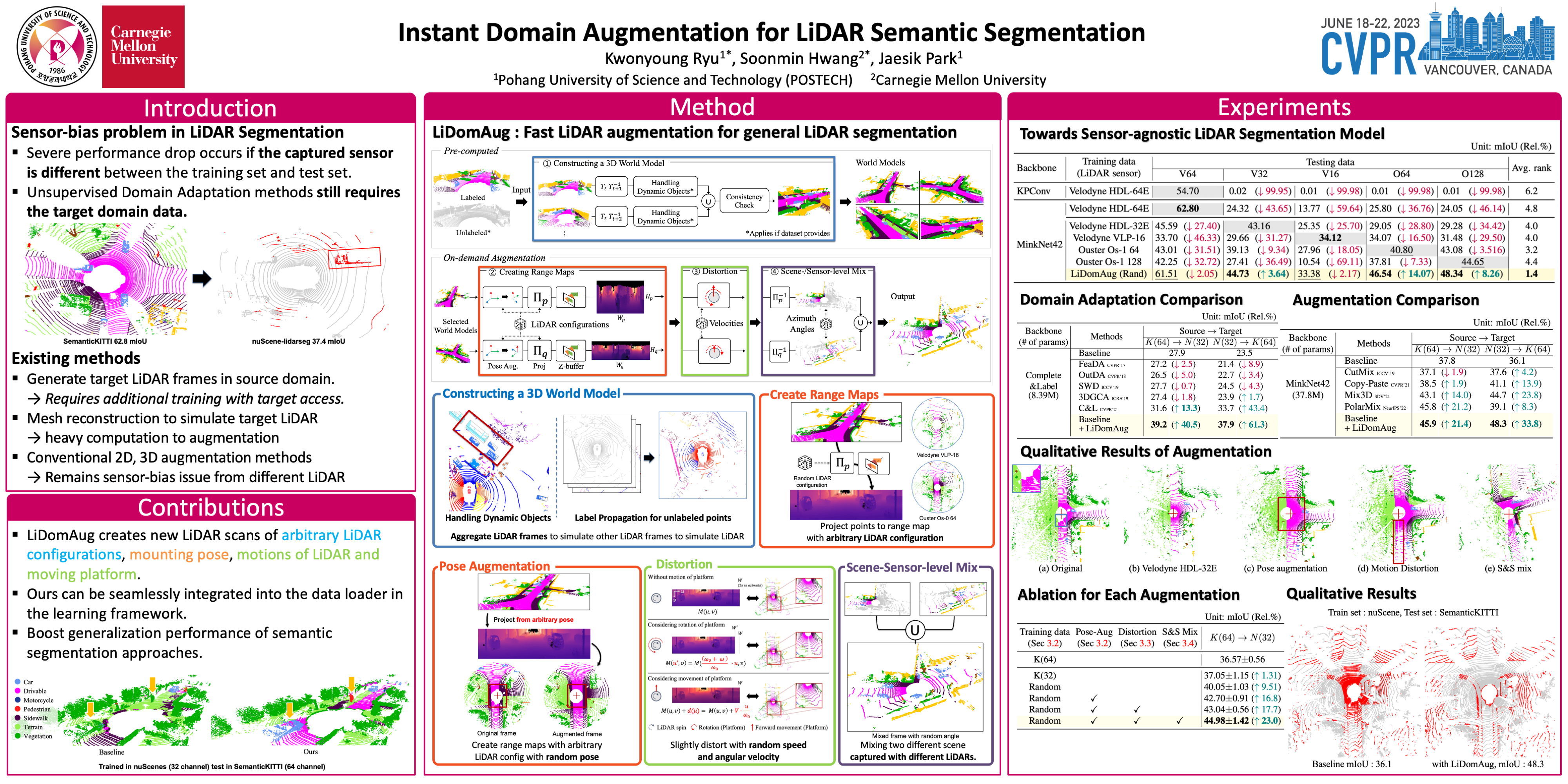
Instant Domain Augmentation for LiDAR Semantic Segmentation
Kwonyoung Ryu · Soonmin Hwang · Jaesik Park
West Building Exhibit Halls ABC 107
{kind=link}
Despite the increasing popularity of LiDAR sensors, perception algorithms using 3D LiDAR data struggle with the ‘sensor-bias problem’. Specifically, the performance of perception algorithms significantly drops when an unseen specification of LiDAR sensor is applied at test time due to the domain discrepancy. This paper presents a fast and flexible LiDAR augmentation method for the semantic segmentation task, called ‘LiDomAug’. It aggregates raw LiDAR scans and creates a LiDAR scan of any configurations with the consideration of dynamic distortion and occlusion, resulting in instant domain augmentation. Our on-demand augmentation module runs at 330 FPS, so it can be seamlessly integrated into the data loader in the learning framework. In our experiments, learning-based approaches aided with the proposed LiDomAug are less affected by the sensor-bias issue and achieve new state-of-the-art domain adaptation performances on SemanticKITTI and nuScenes dataset without the use of the target domain data. We also present a sensor-agnostic model that faithfully works on the various LiDAR configurations.