Poster
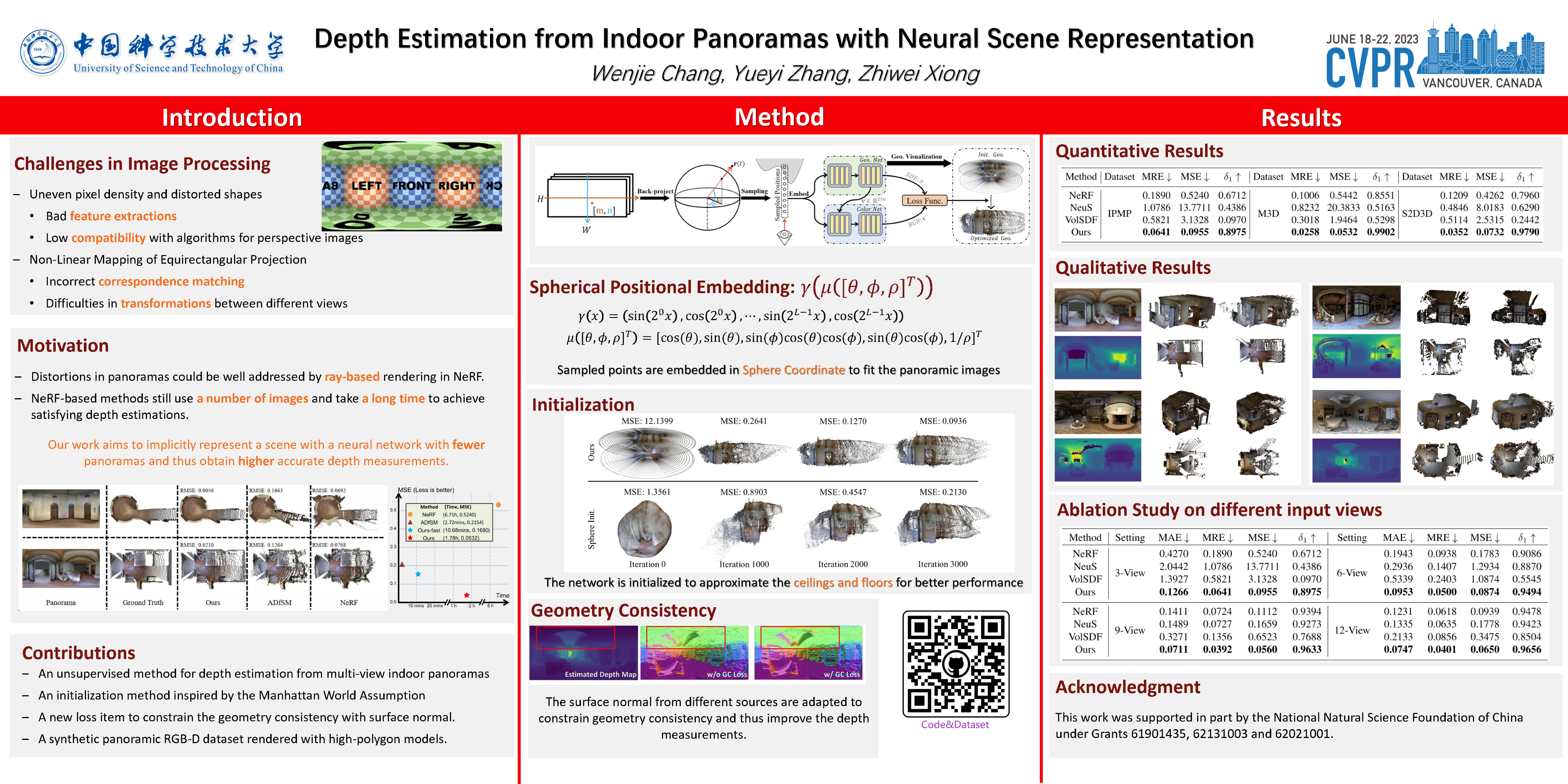
Depth Estimation From Indoor Panoramas With Neural Scene Representation
Wenjie Chang · Yueyi Zhang · Zhiwei Xiong
West Building Exhibit Halls ABC 085
{kind=link}
Depth estimation from indoor panoramas is challenging due to the equirectangular distortions of panoramas and inaccurate matching. In this paper, we propose a practical framework to improve the accuracy and efficiency of depth estimation from multi-view indoor panoramic images with the Neural Radiance Field technology. Specifically, we develop two networks to implicitly learn the Signed Distance Function for depth measurements and the radiance field from panoramas. We also introduce a novel spherical position embedding scheme to achieve high accuracy. For better convergence, we propose an initialization method for the network weights based on the Manhattan World Assumption. Furthermore, we devise a geometric consistency loss, leveraging the surface normal, to further refine the depth estimation. The experimental results demonstrate that our proposed method outperforms state-of-the-art works by a large margin in both quantitative and qualitative evaluations. Our source code is available at https://github.com/WJ-Chang-42/IndoorPanoDepth.