Poster
PyPose: A Library for Robot Learning With Physics-Based Optimization
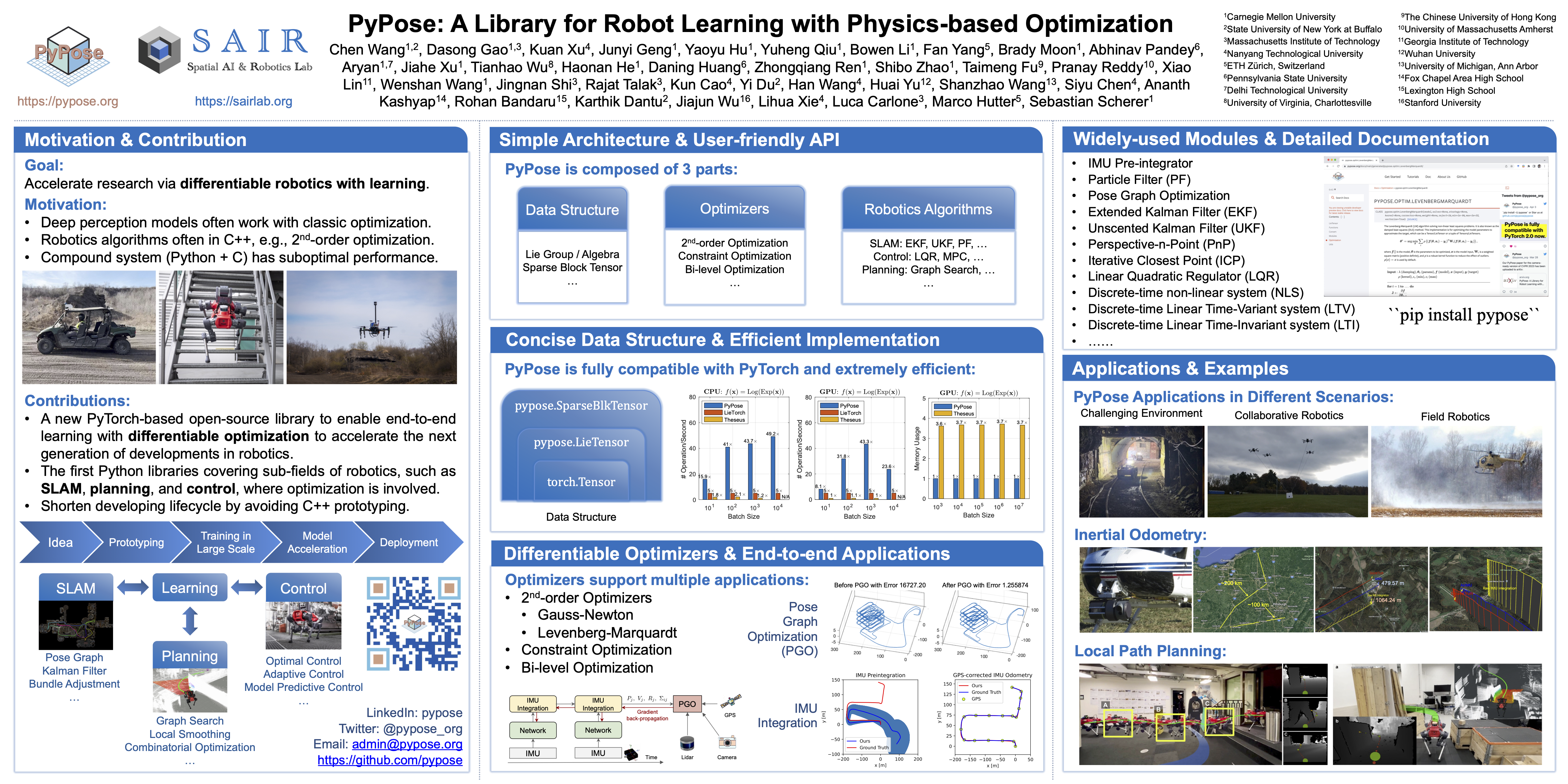
Chen Wang · Dasong Gao · Kuan Xu · Junyi Geng · Yaoyu Hu · Yuheng Qiu · Bowen Li · Fan Yang · Brady Moon · Abhinav Pandey · Aryan · Jiahe Xu · Tianhao Wu · Haonan He · Daning Huang · Zhongqiang Ren · Shibo Zhao · Taimeng Fu · Pranay Reddy · Xiao Lin · Wenshan Wang · Jingnan Shi · Rajat Talak · Kun Cao · Yi Du · Han Wang · Huai Yu · Shanzhao Wang · Siyu Chen · Ananth Kashyap · Rohan Bandaru · Karthik Dantu · Jiajun Wu · Lihua Xie · Luca Carlone · Marco Hutter · Sebastian Scherer
West Building Exhibit Halls ABC 135
{kind=link}
Deep learning has had remarkable success in robotic perception, but its data-centric nature suffers when it comes to generalizing to ever-changing environments. By contrast, physics-based optimization generalizes better, but it does not perform as well in complicated tasks due to the lack of high-level semantic information and reliance on manual parametric tuning. To take advantage of these two complementary worlds, we present PyPose: a robotics-oriented, PyTorch-based library that combines deep perceptual models with physics-based optimization. PyPose’s architecture is tidy and well-organized, it has an imperative style interface and is efficient and user-friendly, making it easy to integrate into real-world robotic applications. Besides, it supports parallel computing of any order gradients of Lie groups and Lie algebras and 2nd-order optimizers, such as trust region methods. Experiments show that PyPose achieves more than 10× speedup in computation compared to the state-of-the-art libraries. To boost future research, we provide concrete examples for several fields of robot learning, including SLAM, planning, control, and inertial navigation.