Poster
LinK: Linear Kernel for LiDAR-Based 3D Perception
Tao Lu · Xiang Ding · Haisong Liu · Gangshan Wu · Limin Wang
West Building Exhibit Halls ABC 105
{kind=link}
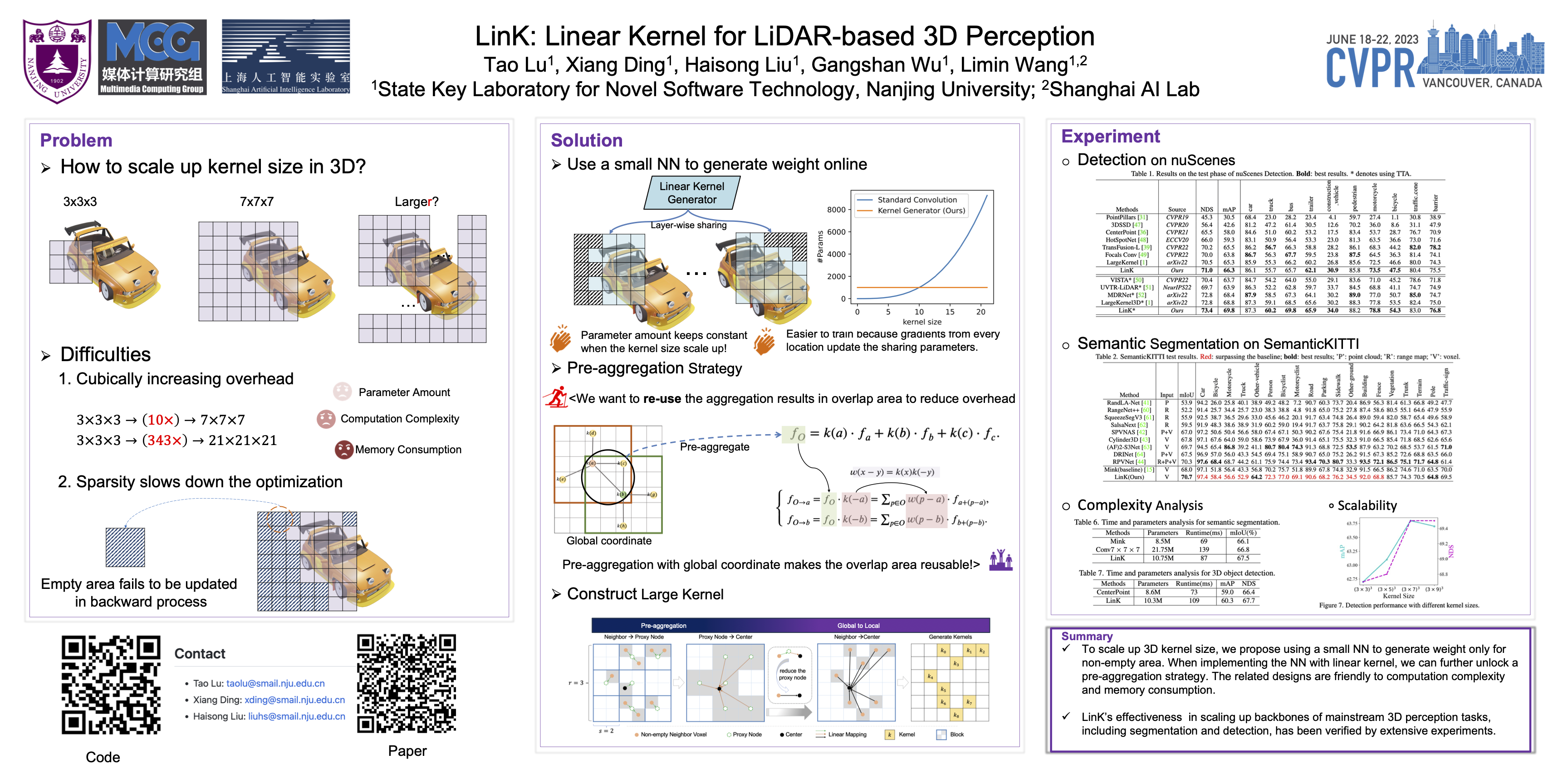
Extending the success of 2D Large Kernel to 3D perception is challenging due to: 1. the cubically-increasing overhead in processing 3D data; 2. the optimization difficulties from data scarcity and sparsity. Previous work has taken the first step to scale up the kernel size from 3x3x3 to 7x7x7 by introducing block-shared weights. However, to reduce the feature variations within a block, it only employs modest block size and fails to achieve larger kernels like the 21x21x21. To address this issue, we propose a new method, called LinK, to achieve a wider-range perception receptive field in a convolution-like manner with two core designs. The first is to replace the static kernel matrix with a linear kernel generator, which adaptively provides weights only for non-empty voxels. The second is to reuse the pre-computed aggregation results in the overlapped blocks to reduce computation complexity. The proposed method successfully enables each voxel to perceive context within a range of 21x21x21. Extensive experiments on two basic perception tasks, 3D object detection and 3D semantic segmentation, demonstrate the effectiveness of our method. Notably, we rank 1st on the public leaderboard of the 3D detection benchmark of nuScenes (LiDAR track), by simply incorporating a LinK-based backbone into the basic detector, CenterPoint. We also boost the strong segmentation baseline’s mIoU with 2.7% in the SemanticKITTI test set. Code is available at https://github.com/MCG-NJU/LinK.