Poster
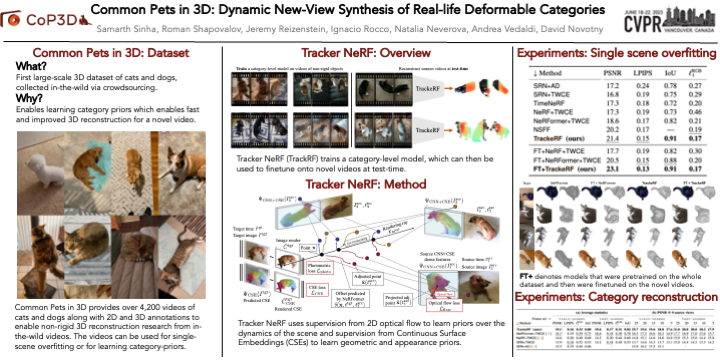
Common Pets in 3D: Dynamic New-View Synthesis of Real-Life Deformable Categories
Samarth Sinha · Roman Shapovalov · Jeremy Reizenstein · Ignacio Rocco · Natalia Neverova · Andrea Vedaldi · David Novotny
West Building Exhibit Halls ABC 071

{kind=link}
Obtaining photorealistic reconstructions of objects from sparse views is inherently ambiguous and can only be achieved by learning suitable reconstruction priors. Earlier works on sparse rigid object reconstruction successfully learned such priors from large datasets such as CO3D. In this paper, we extend this approach to dynamic objects. We use cats and dogs as a representative example and introduce Common Pets in 3D (CoP3D), a collection of crowd-sourced videos showing around 4,200 distinct pets. CoP3D is one of the first large-scale datasets for benchmarking non-rigid 3D reconstruction “in the wild”. We also propose Tracker-NeRF, a method for learning 4D reconstruction from our dataset. At test time, given a small number of video frames of an unseen sequence, Tracker-NeRF predicts the trajectories and dynamics of the 3D points and generates new views, interpolating viewpoint and time. Results on CoP3D reveal significantly better non-rigid new-view synthesis performance than existing baselines. The data is available on the project webpage: https://cop3d.github.io/.